Note
Go to the end to download the full example code.
Ellipse Rolling on Uneven Street¶
Description¶
An ellipse is rolling on an uneven street without slipping or jumping. The street must be smooth enough so the ellipse cannot touch it in more than one point.
Notes¶
The only issues her are geometric:
Find the center of the ellipse, given the contact point and the slope of at the contact point.
Find the speed of the contact point as a function of the angular velocity of the ellipse, and of course other parameters.
The first issue is relatively simple: I found a way, but chatGPT found a simpler way.
The second issue is much more difficult.
The special case of the ellipse running on a horizontal line is solved explicitly here: https://www.mapleprimes.com/DocumentFiles/210428_post/rolling-ellipse.pdf
Dr. Carlos Roithmayr found the formula for the general case and generously shared it with me, see the document. https://www.dropbox.com/scl/fi/tfcxldh5zmycwkm7michi/Planar_Ellipse_Rolling_on_a_Curve.pdf?rlkey=t4bn3zxm1k9z5vh72epgazxvy&st=69bwwn9s&dl=0
Parameters
\(N\) : inertial frame
\(A\) : frame fixed to the ellipse
\(P_0\) : point fixed in N
\(Dmc\) : center of the ellipse
\(C_P\) : contact point
\(P_o\) : location of the particle fixed to the ellipse
\(q, u\) : angle of rotation of the ellipse, its speed
\(x, u_x\) : X coordinate of the contact point CP, its speed
\(m_x, m_y, um_x, um_y\) : coordinates of the center of the ellipse, its speeds
\(m, m_o\) : mass of the ellipse, of the particle attached to the ellipse
\(a, b\) : semi axes of the ellipse
\(amplitude, frequenz\) : parameters for the street.
\(i_{ZZ}\): moment of inertia of the ellipse around the Z axis
\(\alpha, \beta\): determine the location of the particle w.r.t. Dmc
\(aux_x, aux_y, f_x, f_y\): needed for the reaction forces
\(rhs_0....rhs_6\): place holders for \(RHS = MM^{-1} \cdot force\) calculated numerically later. Needed for the reaction forces.
import numpy as np
import sympy as sm
import sympy.physics.mechanics as me
import matplotlib.pyplot as plt
from scipy.interpolate import CubicSpline
from scipy.optimize import minimize, root
from scipy.integrate import solve_ivp
from matplotlib.animation import FuncAnimation
from matplotlib import patches
Kane’s Equations¶
Frames and points.
N, A = sm.symbols('N, A', cls=me.ReferenceFrame)
P0, Dmc, CP, Po = sm.symbols('P0, Dmc, CP, Po', cls=me.Point)
t = sm.symbols('t')
P0.set_vel(N, 0)
Parameters of the system.
m, mo, g, CPx, CPy, a, b, iZZ, alpha, beta, amplitude, frequenz = sm.symbols(
'm, mo, g, CPx, CPy, a, b, iZZ, alpha, beta, amplitude, frequenz')
Center of mass of the ellipse.
mx, my, umx, umy = me.dynamicsymbols('mx, my, umx, umy')
Rotation of the ellipse, coordinates of the contact point.
q, x, y, u, ux, uy = me.dynamicsymbols('q, x, y, u, ux, uy')
Needed for the reaction forces.
auxx, auxy, fx, fy = me.dynamicsymbols('auxx, auxy, fx, fy')
Placeholders for the right-hand sides of the ODEs. Needed for the reaction forces.
rhs_list = [sm.symbols('rhs' + str(i)) for i in range(10)]
Orientation of the body fixed frame of the ellipse.
A.orient_axis(N, q, N.z)
A.set_ang_vel(N, u*N.z)
Model the street.
It is a parabola, open to the top, with superimposed sinus waves. Then its osculating circle is calculated.
rumpel = 3 # the higher the number the more 'uneven the street'
strasse = sum([amplitude/j * sm.sin(j*frequenz * x)
for j in range(1, rumpel)])
strassen_form = (frequenz/2. * x)**2
gesamt = strassen_form + strasse
gesamtdx = gesamt.diff(x)
r_max = ((sm.S(1.) + (gesamt.diff(x))**2)**sm.S(3/2)/gesamt.diff(x, 2))
Formula to find the center of an ellipse with semi axes a, b, given an point P(x / y) on the ellipse and the slope of the ellipse at this point. (Long dialogue with chatGPT)
x : x - coordinate (in the inertial system N) of the point
y : y - coordinate (in the inertial system N) of the point
q : rotation of the ellipse
\(k_0\) : slope of the ellipse at P
this gives the center \(M(m_x / m_y)\) of the ellipse as:
\(m_x = x - \dfrac{k0 \cdot (a^2 \cdot \cos^2(q) + b^2 \cdot \sin^2(q)) - (a^2 - b^2) \cdot \sin(q) \cdot \cos(q)}{\sqrt{k0^2 \cdot (a^2 \cdot \cos^2(q) + b^2 \cdot \sin^2(q)) - 2\cdot k0 \cdot (a^2 - b^2) \cdot \sin(q) \cdot \cos(q) + (a^2 \cdot \sin^2(q) + b^2 \cdot \cos^2(q))}}\)
\(m_y = y - \dfrac{k0 \cdot(a^2 - b^2) \cdot \sin(q) \cdot \cos(q) - (a^2 \cdot \cos^2(q) + b^2 \cdot \sin^2(q))}{\sqrt{k0^2 \cdot (a^2 \cdot \cos^2(q) + b^2 \cdot \sin^2(q)) - 2\cdot k0 \cdot (a^2 - b^2) \cdot \sin(q) \cdot \cos(q) + (a^2 \cdot \sin^2(q) + b^2 \cdot \cos^2(q))}}\)
The slope of the ellipse at the contact point must be equal to the slope of the road at the contact point.
k0 = gesamt.diff(x)
denom = sm.sqrt(k0**2 * (a**2 * sm.cos(q)**2 + b**2 * sm.sin(q)**2) -
2 * k0 * (a**2 - b**2) * sm.sin(q) * sm.cos(q) +
(a**2 * sm.sin(q)**2 + b**2 * sm.cos(q)**2))
num_x = k0 * (a**2 * sm.cos(q)**2 + b**2 * sm.sin(q)**2) - \
(a**2 - b**2) * sm.sin(q) * sm.cos(q)
num_y = k0 * (a**2 - b**2) * sm.sin(q) * sm.cos(q) - \
(a**2 * sm.sin(q)**2 + b**2 * sm.cos(q)**2)
mx_c = x - num_x / denom
my_c = gesamt - num_y / denom
For the velocity constraints the speed of the center of the ellipse is needed.
umx_c = mx_c.diff(t).subs({x.diff(t): ux, q.diff(t): u})
umy_c = my_c.diff(t).subs({x.diff(t): ux, q.diff(t): u})
Relationship of \(\dot{x}(t)\) to \(\dot{q}(t)\):
The goal is to find the speed of the contact point as a function of the angular velocity of the ellipse, and of course other parameters.
Thecformula below was found by (the paid for version of) chatGPT
\(\dot {x}(t) = - \dfrac{(1 + \left[\frac{d}{dx}f(x)\right]^2) \cdot a^2 \cdot b^2} {\left(a^2 \cdot(\sin(q) - \frac{d}{dx}f(x) \cdot \cos(q))^2 + b^2 \cdot(\cos(q) + \frac{d}{dx}f(x) \cdot \sin(q))^2 \right)^{\frac{3}{2}} - a^2 \cdot b^2 \cdot \frac{d^2}{dx^2}f(x) } \cdot \dot{q}(t)\)
#
fdx = gesamt.diff(x)
fdxdx = fdx.diff(x)
denom = ((a*a*(sm.sin(q) - fdx*sm.cos(q))**2 + b*b*(sm.cos(q) +
fdx*sm.sin(q))**2)**(3/2) -
a**2 * b**2 * fdxdx)
num = (1 + gesamt.diff(x)**2) * a**2 * b**2
rhsx = -u * num / denom
Contact point position and velocity.
CP.set_pos(P0, x*N.x + y*N.y)
CP.set_vel(N, ux*N.x + uy*N.y)
Ellipse center position and velocity
Dmc.set_pos(P0, mx*N.x + my*N.y)
Dmc.set_vel(N, umx*N.x + umy*N.y + auxx*N.x + auxy*N.y)
particle on ellipse position and velocity
Po.set_pos(Dmc, a*alpha*A.x + b*beta*A.y)
_ = Po.v2pt_theory(Dmc, N, A)
Kane’s Equations.
Inert = me.inertia(A, 0., 0., iZZ)
bodye = me.RigidBody('bodye', Dmc, A, m, (Inert, Dmc))
Poa = me.Particle('Poa', Po, mo)
BODY = [bodye, Poa]
FL = [(Dmc, -m*g*N.y + fx*N.x + fy*N.y), (Po, -mo*g*N.y)]
kd = sm.Matrix([
u - q.diff(t),
ux - x.diff(t),
uy - y.diff(t),
umx - mx.diff(t),
umy - my.diff(t),
])
speed_constr = sm.Matrix([
umx - umx_c,
umy - umy_c,
ux - rhsx,
uy - gesamt.diff(t),
])
q1 = [q, x, y, mx, my]
u_ind = [u]
u_dep = [ux, uy, umx, umy]
aux = [auxx, auxy]
KM = me.KanesMethod(
N,
q_ind=q1,
u_ind=u_ind,
u_dependent=u_dep,
kd_eqs=kd,
velocity_constraints=speed_constr,
u_auxiliary=aux
)
fr, frstar = KM.kanes_equations(BODY, FL)
MM = KM.mass_matrix_full
force = KM.forcing_full.subs({fx: 0., fy: 0.,
sm.Derivative(sm.sign(k0), t): sm.sign(k0)})
Get the reaction forces (eingepraegte Kraft = reaction force in German). Replace the accelerations appearing in eingepraegt with the corresponding place holders for right-hand sides of the equations of motion.
eingepraegt_dict = {
sm.Derivative(x, t): rhsx,
sm.Derivative(u, t): rhs_list[5],
sm.Derivative(umx, t): rhs_list[8],
sm.Derivative(umy, t): rhs_list[9],
}
eingepraegt1 = (KM.auxiliary_eqs).subs(eingepraegt_dict)
Print some information about the symbolic expressions.
print('eingepraegt1 DS', me.find_dynamicsymbols(eingepraegt1))
print('eingepraegt1 free symbols', eingepraegt1.free_symbols)
print(f'eingepraegt1 has {sm.count_ops(eingepraegt1):,} operations', '\n')
print('force DS', me.find_dynamicsymbols(force))
print('force free symbols', force.free_symbols)
print(f'force has {sm.count_ops(force):,} operations', '\n')
print('MM DS', me.find_dynamicsymbols(MM))
print('MM free symbols', MM.free_symbols)
print(f'MM has {sm.count_ops(MM):,} operations', '\n')
eingepraegt1 DS {fy(t), u(t), fx(t), q(t)}
eingepraegt1 free symbols {m, a, beta, g, alpha, rhs8, t, rhs5, mo, rhs9, b}
eingepraegt1 has 62 operations
force DS {umx(t), u(t), q(t), umy(t), uy(t), x(t), ux(t)}
force free symbols {t, m, a, frequenz, mo, g, beta, amplitude, alpha, b}
force has 9,592 operations
MM DS {x(t), q(t)}
MM free symbols {m, a, frequenz, beta, amplitude, alpha, t, iZZ, mo, b}
MM has 4,627 operations
Define the energies.
pot_energie = (m * g * me.dot(Dmc.pos_from(P0), N.y) +
mo * g * me.dot(Po.pos_from(P0), N.y))
kin_energie = sum([koerper.kinetic_energy(N).subs({i: 0. for i in aux})
for koerper in BODY])
Compilation.
qL = q1 + u_ind + u_dep
pL = [m, mo, g, a, b, iZZ, alpha, beta, amplitude, frequenz]
F = [fx, fy]
MM_lam = sm.lambdify(qL + pL, MM, cse=True)
force_lam = sm.lambdify(qL + pL, force, cse=True)
gesamt = gesamt.subs({CPx: x})
gesamt_lam = sm.lambdify([x] + pL, gesamt, cse=True)
eingepraegt_lam = sm.lambdify(F + qL + pL + rhs_list, eingepraegt1,
cse=True)
pot_lam = sm.lambdify(qL + pL, pot_energie, cse=True)
kin_lam = sm.lambdify(qL + pL, kin_energie, cse=True)
r_max_lam = sm.lambdify([x] + pL, r_max, cse=True)
Numerical Integration¶
Set the parameters.
m1 = 1.0
mo1 = 1.0
g1 = 9.8
a1 = 1.
b1 = 2.
amplitude1 = 1.
frequenz1 = 0.275
alpha1 = 0.5
beta1 = 0.5
q11 = 1.0
u11 = 2.5
x11 = 5.0
intervall = 15.0
iZZ1 = 0.25 * m1 * (a1**2 + b1**2) # from the internet
pL_vals = [m1, mo1, g1, a1, b1, iZZ1, alpha1, beta1, amplitude1, frequenz1]
schritte = int(intervall * 100.0)
Find correct initial conditions for the dependent speeds and locations.
gesamt_dx = gesamt.diff(x)
gesamt_dx_lam = sm.lambdify([x] + [amplitude, frequenz], gesamt_dx, cse=True)
k0 = gesamt_dx
denom = sm.sqrt(k0**2 * (a**2 * sm.cos(q)**2 + b**2 * sm.sin(q)**2) -
2 * k0 * (a**2 - b**2) * sm.sin(q) * sm.cos(q) +
(a**2 * sm.sin(q)**2 + b**2 * sm.cos(q)**2))
num_x = k0 * (a**2 * sm.cos(q)**2 + b**2 * sm.sin(q)**2) - \
(a**2 - b**2) * sm.sin(q) * sm.cos(q)
num_y = k0 * (a**2 - b**2) * sm.sin(q) * sm.cos(q) - \
(a**2 * sm.sin(q)**2 + b**2 * sm.cos(q)**2)
mx = x - num_x / denom
my = gesamt - num_y / denom
mx_lam = sm.lambdify([x, q, a, b, amplitude, frequenz], mx, cse=True)
my_lam = sm.lambdify([x, q, a, b, amplitude, frequenz], my, cse=True)
mx1 = mx_lam(x11, q11, a1, b1, amplitude1, frequenz1)
my1 = my_lam(x11, q11, a1, b1, amplitude1, frequenz1)
To get correct initial speeds, the velocity constraints must be solved.
matrix_A = speed_constr.jacobian((ux, uy, umx, umy))
vector_b = speed_constr.subs({ux: 0., uy: 0., umx: 0., umy: 0.})
loesung = (matrix_A.LUsolve(-vector_b)).subs({q.diff(t): u,
x.diff(t): rhsx})
loesung = [loesung[i] for i in range(4)]
loesung_lam = sm.lambdify([x, q, u, a, b, amplitude, frequenz], loesung,
cse=True)
initial_speeds = loesung_lam(x11, q11, u11, a1, b1, amplitude1, frequenz1)
This gives the slope of the ellipse at the contact point. From the internet.
X = (x - mx) * sm.cos(q) + (gesamt - my) * sm.sin(q)
Y = -(x - mx) * sm.sin(q) + (gesamt - my) * sm.cos(q)
KK1 = X * sm.cos(q) / a**2 - Y * sm.sin(q) / b**2
KK2 = X * sm.sin(q) / a**2 + Y * sm.cos(q) / b**2
KK = -KK1 / KK2
KK_lam = sm.lambdify([q, x, a, b, amplitude, frequenz], KK, cse=True)
gesamt_dx_lam = sm.lambdify([x] + [amplitude, frequenz], gesamt_dx, cse=True)
Plot the initial position.
gesamt_lam = sm.lambdify([x] + [amplitude, frequenz], gesamt, cse=True)
XX = np.linspace(-15, 15, 200)
fig, ax = plt.subplots(figsize=(8, 8))
ax.plot(XX, gesamt_lam(XX, amplitude1, frequenz1))
ax.set_aspect('equal')
elli = patches.Ellipse((mx1, my1), width=2.*a1, height=2.*b1,
angle=np.rad2deg(q11), zorder=1, fill=True,
color='red', ec='black')
ax.add_patch(elli)
ax.scatter(mx_lam(x11, q11, a1, b1, amplitude1, frequenz1),
my_lam(x11, q11, a1, b1, amplitude1, frequenz1), s=50)
ax.set_title('Initial position of the ellipse on the street')
ax.set_xlabel('x [m]')
ax.set_ylabel('y [m]')
y1 = gesamt_lam(x11, amplitude1, frequenz1)
_ = ax.scatter(x11, y1, s=50, color='orange')
print('Slope of ellipse and of street should be the same at the contact '
'point:')
print(f"initial slope of street: {gesamt_dx_lam(x11, amplitude1,
frequenz1):.5f}")
print(f"initial slope of ellipse: {KK_lam(q11, x11, a1, b1, amplitude1,
frequenz1):.5f}")
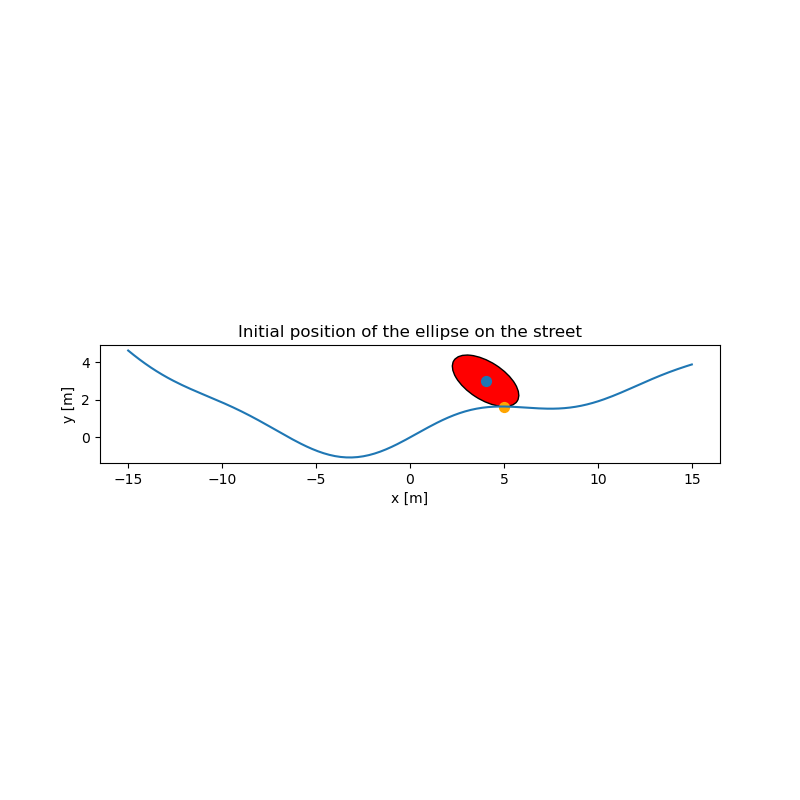
Slope of ellipse and of street should be the same at the contact point:
initial slope of street: -0.01162
initial slope of ellipse: -0.01162
Ensure that the particle is inside the ellipse.
if alpha1**2/a1**2 + beta1**2/b1**2 >= 1.:
raise ValueError('Particle is outside the ellipse')
Ensure that the ellipse will touch the street at exactly one point only. find the largest admissible r_max, given strasse, amplitude, frequenz.
r_max = max(a1**2/b1, b1**2/a1) # max osculating circle of an ellipse
def func2(x, args):
# just needed to get the arguments matching for minimize
return np.abs(r_max_lam(x, *args))
x0 = 0.1 # initial guess
minimal = minimize(func2, x0, pL_vals)
if r_max < (x111 := minimal.get('fun')):
print(f'selected r_max = {r_max} is less than maximally admissible '
f'radius = {x111:.2f}, hence o.k.\n')
else:
print(f'selected r_max {r_max} is larger than admissible radius '
f'{x111:.2f}, hence NOT o.k.\n')
raise ValueError('the semi radii of the ellipse are too large')
y0 = [q11, x11, gesamt_lam(x11, amplitude1, frequenz1), mx1, my1] + \
[u11] + initial_speeds
print('initial conditions are:')
for i in range(len(y0)):
print(f"{str(qL[i])} = {y0[i]:.3f}")
def gradient(t, y, args):
sol = np.linalg.solve(MM_lam(*y, *args), force_lam(*y, *args))
return np.array(sol).T[0]
times = np.linspace(0., intervall, schritte)
t_span = (0., intervall)
resultat1 = solve_ivp(gradient, t_span, y0, t_eval=times, args=(pL_vals,),
atol=1.e-8, rtol=1.e-8, method='DOP853')
resultat = resultat1.y.T
print(resultat1.message)
print(f'the integration made {resultat1.nfev} function calls.')
selected r_max = 4.0 is less than maximally admissible radius = 4.09, hence o.k.
initial conditions are:
q(t) = 1.000
x(t) = 5.000
y(t) = 1.644
mx(t) = 4.022
my(t) = 3.014
u(t) = 2.500
ux(t) = -3.471
uy(t) = 0.040
umx(t) = -3.424
umy(t) = -2.444
The solver successfully reached the end of the integration interval.
the integration made 6986 function calls.
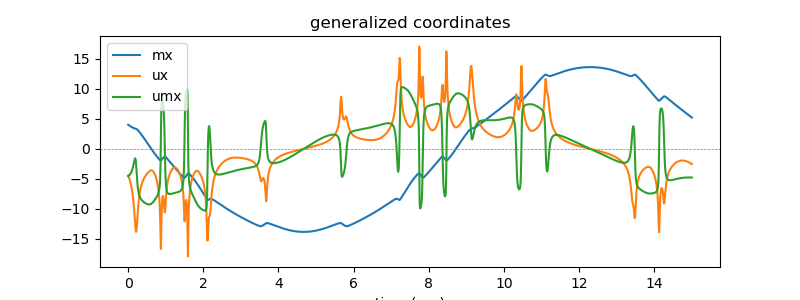
Plot whatever generalized coordinates are of interest.
fig, ax = plt.subplots(figsize=(8, 3))
bezeichnung = ['q', 'x', 'y', 'mx', 'my', 'u', 'ux', 'uy', 'umx', 'umy']
for i in (3, 6, 8):
ax.plot(times, resultat[:, i], label=bezeichnung[i])
ax.set_xlabel('time (sec)')
ax.axhline(0, color='gray', lw=0.5, linestyle='--')
ax.set_title('generalized coordinates')
_ = ax.legend()
Energy
kin_np = np.empty(schritte)
pot_np = np.empty(schritte)
total_np = np.empty(schritte)
for i in range(schritte):
kin_np[i] = kin_lam(*[resultat[i, j] for j in range(resultat.shape[1])],
*pL_vals)
pot_np[i] = pot_lam(*[resultat[i, j] for j in range(resultat.shape[1])],
*pL_vals)
total_np[i] = kin_np[i] + pot_np[i]
fig, ax = plt.subplots(figsize=(8, 3))
ax.plot(times, pot_np, label='potential energy')
ax.plot(times, kin_np, label='kinetic energy')
ax.plot(times, total_np, label='total energy')
ax.set_xlabel('time (sec)')
ax.set_ylabel("energy (Nm)")
ax.set_title('Energies of the system')
ax.legend()
total_max = np.max(total_np)
total_min = np.min(total_np)
print('max deviation of total energy from being constant is {:.2e} % of max'
' total energy'.format((total_max - total_min)/total_max * 100))
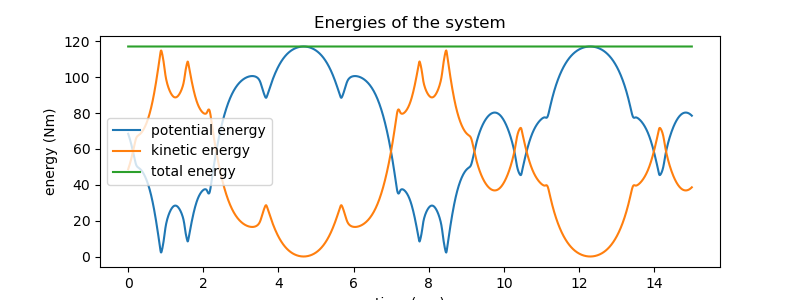
max deviation of total energy from being constant is 4.92e-06 % of max total energy
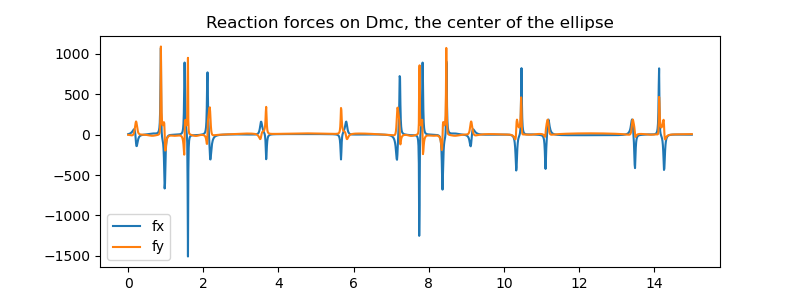
Reaction forces
First \(RHS1 = MM^{-1} \cdot force\) is solved numerically. Then, eingepraegt_lam(…) = 0. for \(f_x, f_y\) is solved. Iteration sometimes helps to improve the results.
RHS1 = np.zeros((schritte, resultat.shape[1]))
for i in range(schritte):
RHS1[i, :] = np.linalg.solve(
MM_lam(*[resultat[i, j] for j in range(resultat.shape[1])],
*pL_vals), force_lam(*[resultat[i, j]
for j in range(resultat.shape[1])],
*pL_vals)).reshape(resultat.shape[1])
def func(x11, *args):
return eingepraegt_lam(*x11, *args).reshape(len(F))
kraft = np.empty((schritte, len(F)))
x0 = tuple([1. for i in range(len(F))]) # initial guess
for i in range(schritte):
for _ in range(2):
y00 = [resultat[i, j] for j in range(resultat.shape[1])]
RHS2 = [RHS1[i, j] for j in range(RHS1.shape[1])]
args = tuple((y00 + pL_vals + RHS2))
A = root(func, x0, args=args)
x0 = tuple(A.x) # updated initial guess, may improve convergence
kraft[i] = A.x
fig, ax = plt.subplots(figsize=(8, 3))
ax.plot(times, kraft[:, 0], label='fx')
ax.plot(times, kraft[:, 1], label='fy')
ax.set_title('Reaction forces on Dmc, the center of the ellipse')
_ = ax.legend()
Animation¶
fps = 10
t_arr = np.linspace(0.0, intervall, schritte)
state_sol = CubicSpline(t_arr, resultat)
coordinates = Po.pos_from(P0).to_matrix(N)
coords_lam = sm.lambdify(qL + pL, coordinates, cse=True)
def init():
xmin, xmax = np.min(resultat[:, 1]) - 3., np.max(resultat[:, 1]) + 3.
ymin, ymax = np.min(resultat[:, 2]) - 3., np.max(resultat[:, 2]) + 3.
fig = plt.figure(figsize=(10, 10))
ax = fig.add_subplot(111)
ax.set_xlim(xmin, xmax)
ax.set_ylim(ymin, ymax)
ax.set_aspect('equal')
ax.grid()
XX = np.linspace(xmin, xmax, 200)
ax.plot(XX, gesamt_lam(XX, amplitude1, frequenz1), color='black')
elli = patches.Ellipse((resultat[0, 3], resultat[0, 4]), width=2.*a1,
height=2.*b1, angle=np.rad2deg(resultat[0, 0]),
zorder=1, fill=True, color='red', ec='black')
ax.add_patch(elli)
line1 = ax.scatter([], [], color='blue', s=30)
line2 = ax.scatter([], [], color='orange', s=30)
line3 = ax.scatter([], [], color='black', s=30)
line4 = ax.axvline(0, color='black', lw=0.75, linestyle='--')
line5 = ax.axvline(0, color='blue', lw=0.75, linestyle='--')
return fig, ax, elli, line1, line2, line3, line4, line5
fig, ax, elli, line1, line2, line3, line4, line5 = init()
def update(t):
message = ((f'Running time {t:.2f} sec \n The black dot is the '
'particle'))
ax.set_title(message, fontsize=12)
elli.set_center((state_sol(t)[3], state_sol(t)[4]))
elli.set_angle(np.rad2deg(state_sol(t)[0]))
coords = coords_lam(*[state_sol(t)[j] for j in range(resultat.shape[1])],
*pL_vals).flatten()
line1.set_offsets((state_sol(t)[3], state_sol(t)[4]))
line2.set_offsets((state_sol(t)[1], state_sol(t)[2]))
line3.set_offsets((coords[0], coords[1]))
line4.set_xdata([state_sol(t)[1], state_sol(t)[1]])
line5.set_xdata([state_sol(t)[3], state_sol(t)[3]])
return elli, line1, line2, line3, line4, line5
frames = np.linspace(0, intervall, int(fps * (intervall)))
animation = FuncAnimation(fig, update, frames=frames, interval=1000/fps)
plt.show()
Total running time of the script: (0 minutes 24.665 seconds)