Note
Go to the end to download the full example code.
Time Delay Estimation¶
Objectives¶
Show how a time delay in a driving force of a mechanical system may be estimated from noisy measurements by introducing a state variable which mimicks the time.
Show how to handle the explicit appearance of the time
tin the equations of motion.Show how to handle non-contiguous measurements.
Introduction¶
A simple pendulum is driven by a torque of the form: \(F \cdot t \cdot \sin(\omega (t - \delta))\), and \(F, \omega, \delta\) are to be erstimated based on noisy measurements of the angle.
Presently, opty cannot handle expressions like \(\sin(\omega \cdot (t - \delta))\) in the equations of motion. To overcome this, a state variable T(t) is introduced, \(\dfrac{dT}{dt} = 1\) is added to the equations of motion, and \(T(t_0) = t_0\) is added as a constraint. This way, T(t) and t have the same values. opty can handle \(\sin(T(t) - \delta)\) in the equations of motion without any problems.
Presently, opty cannot handle the explicit appearance of the time t in
the equations of motion. To overcome this, the time t is replaced by the
T(t) state variable described above.
The driving force is set to zero for \(t < \delta\).
The idea of using non-contiguous measurements was taken from this simulation:
Also the detailed explanation may be found there
Notes¶
It is helpful to give reasonable bounds for the parameters to be estimated. Otherwise opty may converge to another local minimum.
If the initial speeds \(u_i \neq 0\), it seems difficult to get good estimates.
States
\(q_0, ...q_{no_{\textrm{test}}-1}\) : angle of the pendulums [rad]
\(u_0, ...u_{no_{\textrm{test}}-1}\) : angular velocity of the pendulums [rad/s]
\(T(t)\) : variable which mimicks the time t [s]
Known parameters
\(m\) : mass of the pendulum [kg]
\(g\) : gravity [m/s^2]
\(l\) : length of the pendulum [m]
\(I_{zz}\) : inertia of the pendulum [kg*m^2]
\(steep\) : steepness of the differentiable step function [1/s]
\(no_{\textrm{test}}\) : Number of tests performed
\(\textrm{schritte}\) : Number of measurements of the angle per test
Unknown parameters
\(F\) : strength of the driving torque [Nm]
\(\omega\) : frequency of the driving torque [rad/s]
\(\delta\) : time delay of the driving torque [s]
import numpy as np
import sympy as sm
from scipy.integrate import solve_ivp
import sympy.physics.mechanics as me
from opty import Problem
from opty.utils import MathJaxRepr
import matplotlib.pyplot as plt
Set Up the System¶
no_test = 15
N = sm.symbols('N', cls=me.ReferenceFrame)
A = sm.symbols(f'A:{no_test}', cls=me.ReferenceFrame)
O = sm.symbols('O', cls=me.Point)
P = sm.symbols(f'P:{no_test}', cls=me.Point)
q = me.dynamicsymbols(f'q:{no_test}', real=True)
u = me.dynamicsymbols(f'u:{no_test}', real=True)
O.set_vel(N, 0)
t = me.dynamicsymbols._t
m, g, l, iZZ = sm.symbols('m g l iZZ', real=True)
F, omega, delta = sm.symbols('F, omega, delta', real=True)
bodies = []
forces = []
torques = []
kd = []
for i in range(no_test):
A[i].set_ang_vel(N, 0)
P[i].set_vel(N, 0)
A[i].orient_axis(N, q[i], N.z)
A[i].set_ang_vel(N, u[i]*N.z)
P[i].set_pos(O, -l*A[i].y)
P[i].v2pt_theory(O, N, A[i])
inert = me.inertia(A[i], 0, 0, iZZ)
bodies.append(me.RigidBody('body', P[i], A[i], m, (inert, P[i])))
# Driving force set to zero for t < delta
torque = F * t * sm.sin(omega*(t - delta)) * sm.Heaviside(t - delta)
forces.append((P[i], -m*g*N.y))
torques.append((A[i], torque*A[i].z))
kd.append(q[i].diff(t) - u[i])
kd = sm.Matrix(kd)
KM = me.KanesMethod(N, q_ind=q, u_ind=u, kd_eqs=kd)
fr, frstar = KM.kanes_equations(bodies, forces + torques)
MM = KM.mass_matrix_full
force = KM.forcing_full
MathJaxRepr(force)
Convert sympy functions to numpy functions.
qL = q + u
pL = [m, g, l, iZZ, F, omega, delta, t]
MM_lam = sm.lambdify(qL + pL, MM, cse=True)
force_lam = sm.lambdify(qL + pL, force, cse=True)
torque_lam = sm.lambdify(qL + pL, torque, cse=True)
Integrate numerically to get the measurements.
m1 = 1.0
g1 = 9.81
l1 = 1.0
iZZ1 = 1.0
F1 = 0.25
omega1 = 2.0
delta1 = 1.0
t1 = 0.0
np.random.seed(123) # For reproducibility
q10 = 5 * np.random.randn(no_test)
u10 = np.zeros(no_test)
interval = 5.0
schritte = 200 * no_test
pL_vals = [m1, g1, l1, iZZ1, F1, omega1, delta1, t1]
y0 = np.concatenate((q10, u10))
times = np.linspace(0, interval, schritte)
t_span = (0., interval)
def gradient(t, y, args):
args[-1] = t
vals = np.concatenate((y, args))
sol = np.linalg.solve(MM_lam(*vals), force_lam(*vals))
return np.array(sol).T[0]
resultat1 = solve_ivp(gradient, t_span, y0, t_eval=times, args=(pL_vals,))
resultat = resultat1.y.T
measurement = np.empty((len(times), no_test))
for i in range(no_test):
seed = 123 + i # Different seed for each test
np.random.seed(seed)
measurement[:, i] = resultat[:, i] + np.random.normal(0, 0.5,
resultat[:, i].shape)
print('resultat shape', resultat.shape, '\n')
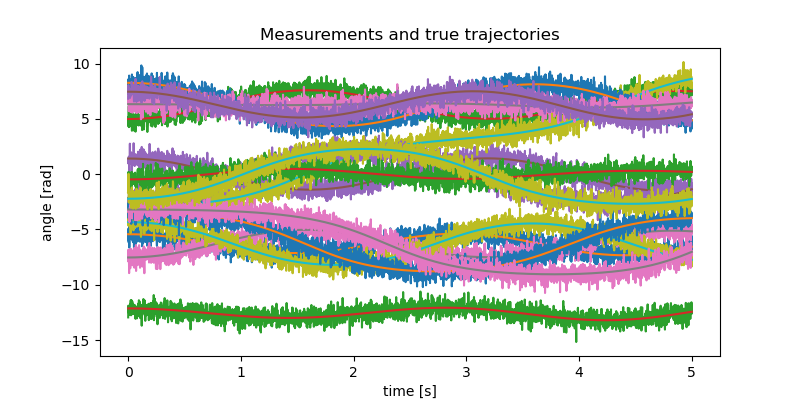
fig, ax = plt.subplots(figsize=(8, 4))
for i in range(no_test):
ax.plot(times, measurement[:, i], label=f'q{i+1}')
ax.plot(times, resultat[:, i], label=f'q{i+1}')
ax.set_xlabel('time [s]')
ax.set_ylabel('angle [rad]')
_ = ax.set_title('Measurements and true trajectories')
resultat shape (3000, 30)
Adapt the eoms for opty.
steep = 50.0
T = me.dynamicsymbols('T')
def step_diff(x, a, steep):
"""A differentiable approximation of the Heaviside function."""
return 0.5 * (1.0 + sm.tanh(steep * (x - a)))
Replace the nondifferentiable Heaviside function with a differentiable approximation. Add the eom, suitable to make T(t) mimick the time t.
T = sm.Function('T')(t)
torques = []
for i in range(no_test):
torque = F * T * sm.sin(omega*(T - delta)) * step_diff(T, delta,
steep)
torques.append((A[i], torque * A[i].z))
KM = me.KanesMethod(N, q_ind=q, u_ind=u, kd_eqs=kd)
fr, frstar = KM.kanes_equations(bodies, forces + torques)
eom = kd.col_join(fr + frstar)
eom = eom.col_join(sm.Matrix([T.diff(t) - 1.0]))
MathJaxRepr(eom)
Set Up the Estimation Problem for opty¶
state_symbols = q + u + [T]
num_nodes = schritte
t0, tf = 0.0, interval
interval_value = (tf - t0) / (num_nodes - 1)
par_map = {}
par_map[m] = m1
par_map[g] = g1
par_map[l] = l1
par_map[iZZ] = iZZ1
If some measurement is more reliable than others its relative weight may be increased by setting the corresponding weight to a value larger than 1.0.
w = [1.0 for _ in range(no_test)]
def obj(free):
summe = 0.0
for i in range(no_test):
summe += w[i] * interval_value * np.sum((measurement[:, i] -
free[i * num_nodes: (i + 1) *
num_nodes])**2)
return summe
def obj_grad(free):
grad = np.zeros_like(free)
for i in range(no_test):
grad[i * num_nodes: (i + 1) * num_nodes] = (-2 * w[i] *
interval_value *
(measurement[:, i] -
free[i * num_nodes:
(i + 1) * num_nodes]))
return grad
instance_constraints = (
T.func(t0) - t0,
)
Give rough bounds for the parameters to be erstimated. This speeds up the convergence.
bounds = {
delta: (0.1, 2.0),
omega: (1.0, 3.0),
F: (0.1, 0.5),
}
prob = Problem(
obj,
obj_grad,
eom,
state_symbols,
num_nodes,
interval_value,
known_parameter_map=par_map,
instance_constraints=instance_constraints,
bounds=bounds,
time_symbol=t,
)
print('Sequence of unknown parameters in solution, to be estimated:',
prob.collocator.unknown_parameters, '\n')
Sequence of unknown parameters in solution, to be estimated: (F, delta, omega)
As the measurements for the angles are known, it makes sense to use them as initial guess for the angles.
initial_guess = np.hstack((
measurement.T.flatten(), # initial guess for q
np.zeros(no_test * num_nodes), # initial guess for u
np.linspace(t0, tf, num_nodes), # initial guess for T
[0.1, 1.0, 0.2], # initial guess for F, omega, delta
))
Solve the problem.
solution, info = prob.solve(initial_guess)
print(info['status_msg'])
b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
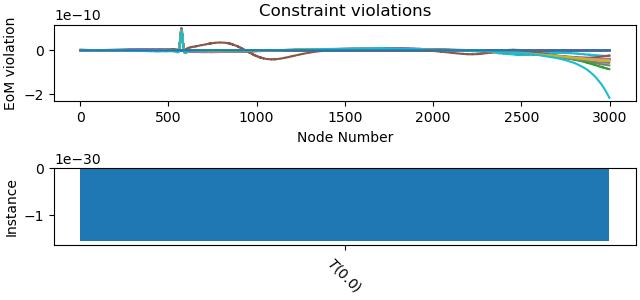
Plot the constraint violations.
_ = prob.plot_constraint_violations(solution)
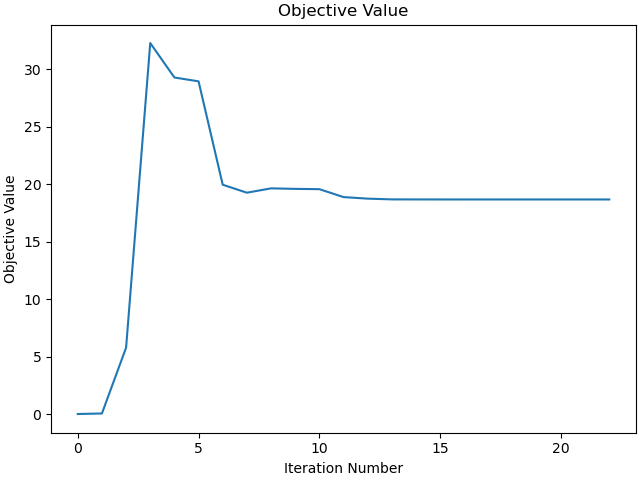
Plot the objective value as a function the the iterations.
_ = prob.plot_objective_value()
Print the results.
print((f'estimated \u03B4 = {solution[-2]:.3f}, given value = {delta1}, '
f'hence error = {(solution[-2] - delta1)/delta1*100:.3f} %'))
print((f'estimated \u03C9 = {solution[-1]:.3f}, given value = {omega1},'
f' hence error = {(solution[-1] - omega1)/omega1*100:.3f} %'))
print((f'estimated F = {solution[-3]:.3f}, given value = {F1},'
f' hence error = {(solution[-3] - F1)/F1*100:.3f} %'))
estimated δ = 0.956, given value = 1.0, hence error = -4.367 %
estimated ω = 1.980, given value = 2.0, hence error = -0.991 %
estimated F = 0.243, given value = 0.25, hence error = -2.947 %
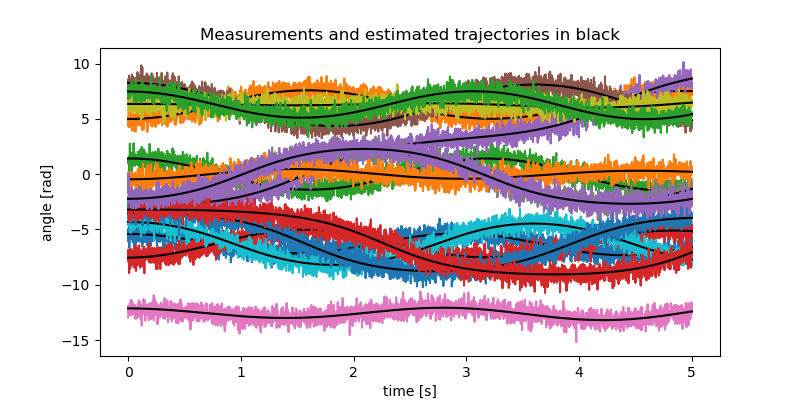
sphinx_gallery_thumbnail_number = 4
fig, ax = plt.subplots(figsize=(8, 4))
for i in range(no_test):
ax.plot(times, measurement[:, i])
# ax.plot(times, resultat[:, i], label=f'q{i+1}')
ax.plot(times, solution[i*schritte:(i + 1)*schritte], color='black')
ax.set_xlabel('time [s]')
ax.set_ylabel('angle [rad]')
_ = ax.set_title('Measurements and estimated trajectories in black')
Total running time of the script: (0 minutes 40.719 seconds)