Note
Go to the end to download the full example code.
Car hits Points¶
Objective¶
Show how the objective function may be used to force an object to hit preset points along the trajectory, at times determined by
opty.
Description¶
A conventional car is modeled: The rear axle is driven, the front axle does the steering.
No speed possible perpendicular to the wheels.
The car must drive from A to B as fast as possible, and hit four given points along the way.
The car is moving in the horizontal X/Y plane.
Explanation of the Objective Function¶
Let \(P_1, P_2, P_3, P_4\) be the four points to be hit, with x and y coordinates \((x_1, y_1), (x_2, y_2), (x_3, y_3), (x_4, y_4)\), and let
hbe the variable time step size.The x - coordinates of the front of the car are given in the array
freeat the firstnum_nodesentries, the y - coordinates at the nextnum_nodesentries.One now looks for the entry in the x - coordinates which is closest to, say, \(x_1\). Say, this is the \(m^{th}\) entry, that is it happens at time \(t_m = m \cdot h\). Now calculate \((\textrm{free[m]} - x_1)^2 + (\textrm{free[m + num_nodes]} - y_1)^2\). This is done for all four points.
The objective function is the sum of these four values, plus
free[-1], which holds the time step size \(h\). Aweightis applied to the time step size, to determine the relative importance of the closeness to the points and the time step size.The gradient of the objective function is calculated accordingly.
Notes¶
This method crucially depends on the fact, that
optylooks at the complete trajectory simultaneously.It is obviously a trade-off between the closeness to the points and the the speed.
It seems to be quite sensitive, and easily converges to ‘solutions’ which are visually far from being optimal, so this may be a method of last resort only.
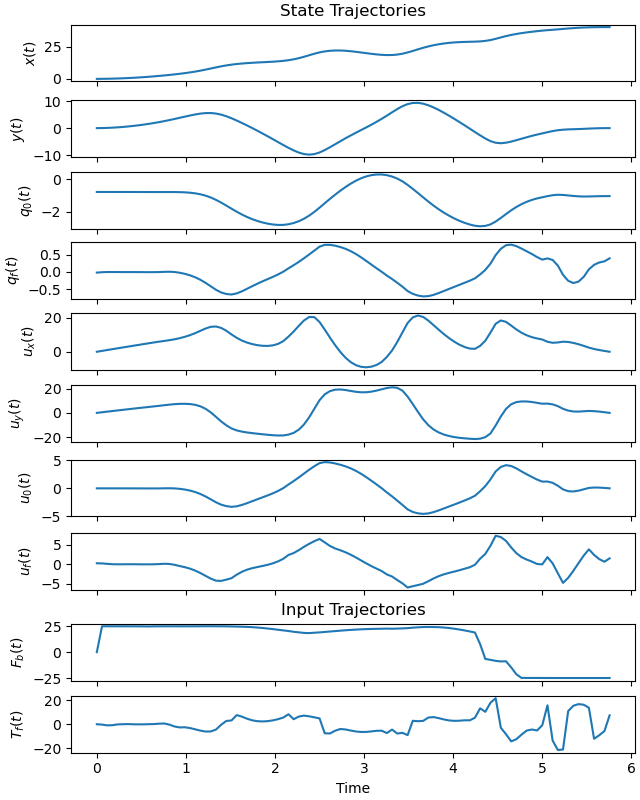
States
\(x, y\) - position of the front of the car
\(q_0, q_f\) - angle of the car body / steering angle
\(u_0, u_f\) - angular speed of the car body / steering angle speed
\(u_x, u_y\) - speed of the front of the car in x and y direction
Inputs
\(F_b\) - force on the rear axle, driving the car
\(T_f\) - torque on the front axle, steering the car
Parameters
\(l\) - length of the car
\(m_0, m_b, m_f\) - mass of the car body, rear and front axle
\(i_{ZZ0}, i_{ZZb}, i_{ZZf}\) - inertia of the car body, rear and front axle around the vertical axis
\(\textrm{reibung}\) - friction coefficient of the rear axle
import sympy.physics.mechanics as me
import numpy as np
import sympy as sm
from scipy.interpolate import CubicSpline
from opty.direct_collocation import Problem
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
Equations of Motion, Kane’s Method¶
N, A0, Ab, Af = sm.symbols('N A0 Ab Af', cls=me.ReferenceFrame)
t = me.dynamicsymbols._t
O, Pb, Dmc, Pf = sm.symbols('O Pb Dmc Pf', cls=me.Point)
O.set_vel(N, 0)
q0, qf = me.dynamicsymbols('q_0 q_f')
u0, uf = me.dynamicsymbols('u_0 u_f')
x, y = me.dynamicsymbols('x y')
ux, uy = me.dynamicsymbols('u_x u_y')
Tf, Fb = me.dynamicsymbols('T_f F_b')
reibung = sm.symbols('reibung')
l, m0, mb, mf, iZZ0, iZZb, iZZf = sm.symbols('l m0 mb mf iZZ0, iZZb, iZZf')
A0.orient_axis(N, q0, N.z)
A0.set_ang_vel(N, u0 * N.z)
Ab.orient_axis(A0, 0, N.z)
Af.orient_axis(A0, qf, N.z)
rot = Af.ang_vel_in(N)
Af.set_ang_vel(N, uf * N.z)
rot1 = Af.ang_vel_in(N)
Pf.set_pos(O, x * N.x + y * N.y)
Pf.set_vel(N, ux * N.x + uy * N.y)
Pb.set_pos(Pf, -l * A0.y)
Pb.v2pt_theory(Pf, N, A0)
Dmc.set_pos(Pf, -l/2 * A0.y)
Dmc.v2pt_theory(Pf, N, A0)
# No speed perpendicular to the wheels
vel1 = me.dot(Pb.vel(N), Ab.x) - 0
vel2 = me.dot(Pf.vel(N), Af.x) - 0
I0 = me.inertia(A0, 0, 0, iZZ0)
body0 = me.RigidBody('body0', Dmc, A0, m0, (I0, Dmc))
Ib = me.inertia(Ab, 0, 0, iZZb)
bodyb = me.RigidBody('bodyb', Pb, Ab, mb, (Ib, Pb))
If = me.inertia(Af, 0, 0, iZZf)
bodyf = me.RigidBody('bodyf', Pf, Af, mf, (If, Pf))
BODY = [body0, bodyb, bodyf]
# Forces
FL = [(Pb, Fb * Ab.y), (Af, Tf * N.z), (Dmc, -reibung * Dmc.vel(N))]
kd = sm.Matrix([ux - x.diff(t), uy - y.diff(t), u0 - q0.diff(t),
me.dot(rot1 - rot, N.z)])
speed_constr = sm.Matrix([vel1, vel2])
q_ind = [x, y, q0, qf]
u_ind = [u0, uf]
u_dep = [ux, uy]
KM = me.KanesMethod(
N,
q_ind=q_ind,
u_ind=u_ind,
kd_eqs=kd,
u_dependent=u_dep,
velocity_constraints=speed_constr,
)
fr, frstar = KM.kanes_equations(BODY, FL)
eom = fr + frstar
eom = kd.col_join(eom)
eom = eom.col_join(speed_constr)
print(f'eom too large to print out. Its shape is {eom.shape} and it has ' +
f'{sm.count_ops(eom)} operations')
eom too large to print out. Its shape is (8, 1) and it has 428 operations
Set Up the Optimization Problem and Solve It¶
state_symbols = [x, y, q0, qf, ux, uy, u0, uf]
h = sm.symbols('h')
num_nodes = 100
t0, tf = 0 * h, (num_nodes - 1) * h
interval_value = h
# Specify the known system parameters.
par_map = {}
par_map[m0] = 1.0
par_map[mb] = 0.5
par_map[mf] = 0.5
par_map[iZZ0] = 1.
par_map[iZZb] = 0.5
par_map[iZZf] = 0.5
par_map[l] = 3.0
par_map[reibung] = 0.25
# Coordinates of points to be reached on the journey
points = [8.0, 16.0, 24.0, 32.0]
x1, x2, x3, x4 = points
y1, y2, y3, y4 = [(-1)**j * 30.0 / np.pi * np.sin(np.pi / 40.0 * i)
for j, i in enumerate(points)]
def proximity_to_points(free):
"""
Find the time, where the x - coordinate is closest to the given points,
and return the sum of the squared distances to the points.
"""
X1 = (free[0: num_nodes] - x1)**2
X2 = (free[0: num_nodes] - x2)**2
X3 = (free[0: num_nodes] - x3)**2
X4 = (free[0: num_nodes] - x4)**2
Y1 = (free[num_nodes: 2 * num_nodes] - y1)**2
Y2 = (free[num_nodes: 2 * num_nodes] - y2)**2
Y3 = (free[num_nodes: 2 * num_nodes] - y3)**2
Y4 = (free[num_nodes: 2 * num_nodes] - y4)**2
minx1 = np.argmin(X1)
minx2 = np.argmin(X2)
minx3 = np.argmin(X3)
minx4 = np.argmin(X4)
return (X1[minx1] + X2[minx2] + X3[minx3] + X4[minx4] + Y1[minx1] +
Y2[minx2] + Y3[minx3] + Y4[minx4])
instance_constraints = (
x.func(t0),
y.func(t0),
ux.func(t0),
uy.func(t0),
q0.func(t0) + np.pi / 4.0,
u0.func(t0),
x.func(tf) - 40.0,
y.func(tf),
ux.func(tf),
uy.func(tf),
)
# Set up the bounds for the optimization variables.
limit = 25.0
bounds = {
h: (0.0, 0.5),
x: (-5.0, 45.0),
y: (-20.0, 20.0),
qf: (-np.pi / 4.0, np.pi / 4.0), # limit the steering angle.
Fb: (-limit, limit),
Tf: (-limit, limit),
}
# Set up the objective function and its gradient as explained above.
initial_guess = np.ones(10 * num_nodes + 1) * 0.01
# Iterate from a simpler problem -more weight on the speed- to coming closer
# to the points.
for i in range(5):
# the larger weight, the more the speed is penalized, the less the
# closeness to the points is important.
weight = 1.e5 / 10**i
# Set up the objective function and its gradient as explained above.
def obj(free):
return proximity_to_points(free) + free[-1] * weight
def obj_grad(free):
X1 = (free[0: num_nodes] - x1)**2
X2 = (free[0: num_nodes] - x2)**2
X3 = (free[0: num_nodes] - x3)**2
X4 = (free[0: num_nodes] - x4)**2
minx1 = np.argmin(X1)
minx2 = np.argmin(X2)
minx3 = np.argmin(X3)
minx4 = np.argmin(X4)
grad = np.zeros_like(free)
grad[minx1] = 2 * (free[minx1] - x1)
grad[minx2] = 2 * (free[minx2] - x2)
grad[minx3] = 2 * (free[minx3] - x3)
grad[minx4] = 2 * (free[minx4] - x4)
grad[minx1 + num_nodes] = 2 * (free[minx1 + num_nodes] - y1)
grad[minx2 + num_nodes] = 2 * (free[minx2 + num_nodes] - y2)
grad[minx3 + num_nodes] = 2 * (free[minx3 + num_nodes] - y3)
grad[minx4 + num_nodes] = 2 * (free[minx4 + num_nodes] - y4)
grad[-1] = 1.0 * weight
return grad
# Set up the objective function and its gradient as explained above.
prob = Problem(
obj,
obj_grad,
eom,
state_symbols,
num_nodes,
interval_value,
known_parameter_map=par_map,
instance_constraints=instance_constraints,
bounds=bounds,
)
prob.add_option('max_iter', 6000)
# Find the optimal solution.
solution, info = prob.solve(initial_guess)
initial_guess = solution
print(f'{i+1} - th iteration')
print('message from optimizer:', info['status_msg'])
print('Iterations needed', len(prob.obj_value))
print(f"objective value {info['obj_val']:.3e}")
print((f"Distance to points {np.sqrt(proximity_to_points(solution)):.3e}"
f" \n"))
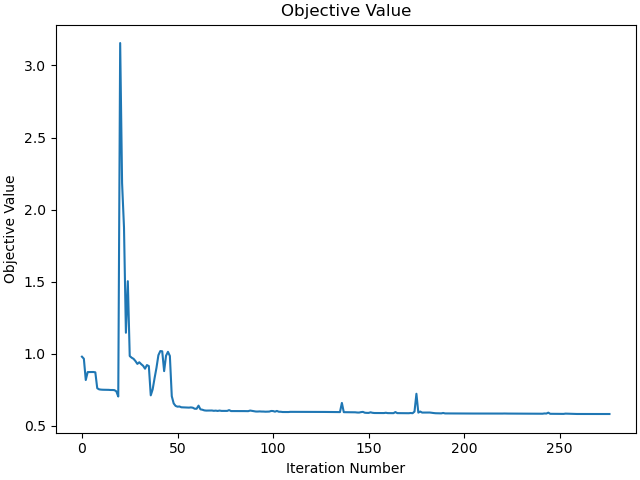
_ = prob.plot_objective_value()
1 - th iteration
message from optimizer: b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Iterations needed 1558
objective value 3.845e+03
Distance to points 1.382e+01
2 - th iteration
message from optimizer: b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Iterations needed 3204
objective value 4.821e+02
Distance to points 8.535e+00
3 - th iteration
message from optimizer: b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Iterations needed 2573
objective value 5.496e+01
Distance to points 1.144e+00
4 - th iteration
message from optimizer: b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Iterations needed 34
objective value 7.633e+00
Distance to points 4.900e-01
5 - th iteration
message from optimizer: b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Iterations needed 277
objective value 5.817e-01
Distance to points 1.715e-02
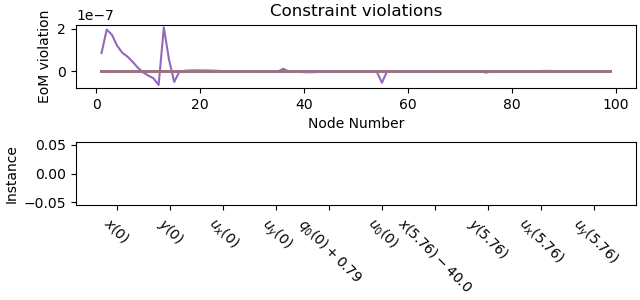
Plot the constraint violations.
_ = prob.plot_constraint_violations(solution)
Plot generalized coordinates / speeds and forces / torques
_ = prob.plot_trajectories(solution)
Animation¶
fps = 15
def add_point_to_data(line, x, y):
# to trace the path of the point. Copied from Timo.
old_x, old_y = line.get_data()
line.set_data(np.append(old_x, x), np.append(old_y, y))
state_vals, input_vals, _, h_val = prob.parse_free(solution)
t_arr = np.linspace(t0, (num_nodes - 1) * h_val, num_nodes)
state_sol = CubicSpline(t_arr, state_vals.T)
input_sol = CubicSpline(t_arr, input_vals.T)
# create additional points for the axles
Pbl, Pbr, Pfl, Pfr = sm.symbols('Pbl Pbr Pfl Pfr', cls=me.Point)
# end points of the force, length of the axles
Fbq = me.Point('Fbq')
la = sm.symbols('la')
fb, tq = sm.symbols('f_b, t_q')
Pbl.set_pos(Pb, -la/2 * Ab.x)
Pbr.set_pos(Pb, la/2 * Ab.x)
Pfl.set_pos(Pf, -la/2 * Af.x)
Pfr.set_pos(Pf, la/2 * Af.x)
Fbq.set_pos(Pb, fb * Ab.y)
coordinates = Pb.pos_from(O).to_matrix(N)
for point in (Dmc, Pf, Pbl, Pbr, Pfl, Pfr, Fbq):
coordinates = coordinates.row_join(point.pos_from(O).to_matrix(N))
pL, pL_vals = zip(*par_map.items())
la1 = par_map[l] / 1.5 # length of an axle
coords_lam = sm.lambdify((*state_symbols, fb, *pL, la), coordinates,
cse=True)
def init():
xmin = np.min(state_vals[0, :]) - 3.0
xmax = np.max(state_vals[0, :]) + 3.0
ymin = np.min(state_vals[1, :]) - 3.0
ymax = np.max(state_vals[1, :]) + 3.0
fig = plt.figure(figsize=(8, 8))
ax = fig.add_subplot(111)
ax.set_xlim(xmin, xmax)
ax.set_ylim(ymin, ymax)
ax.set_aspect('equal')
ax.grid()
ax.scatter([x1, x2, x3, x4], [y1, y2, y3, y4], color='black', marker='o',
s=25)
ax.scatter(0.0, 0.0, color='red', marker='o', s=25)
ax.scatter(40.0, 0.0, color='green', marker='o', s=25)
line1, = ax.plot([], [], color='orange', lw=2)
line2, = ax.plot([], [], color='red', lw=2)
line3, = ax.plot([], [], color='magenta', lw=2)
line4 = ax.quiver([], [], [], [], color='green', scale=150,
width=0.004, headwidth=8)
line5, = ax.plot([], [], color='blue', lw=0.5)
return fig, ax, line1, line2, line3, line4, line5
# Function to update the plot for each animation frame
fig, ax, line1, line2, line3, line4, line5 = init()
def update(t):
message = (f'running time {t:.2f} sec \n The rear axle is red, the ' +
'front axle is magenta \n The driving/breaking force is green')
ax.set_title(message, fontsize=12)
coords = coords_lam(*state_sol(t), input_sol(t)[0], *pL_vals, la1)
# Pb, Dmc, Pf, Pbl, Pbr, Pfl, Pfr, Fbq
line1.set_data([coords[0, 0], coords[0, 2]], [coords[1, 0], coords[1, 2]])
line2.set_data([coords[0, 3], coords[0, 4]], [coords[1, 3], coords[1, 4]])
line3.set_data([coords[0, 5], coords[0, 6]], [coords[1, 5], coords[1, 6]])
add_point_to_data(line5, coords[0, 2], coords[1, 2])
line4.set_offsets([coords[0, 0], coords[1, 0]])
line4.set_UVC(coords[0, 7] - coords[0, 0], coords[1, 7] - coords[1, 0])
# return line1, line2, line3, line4, #line5, line6,
tf = (num_nodes - 1) * h_val
frames = np.linspace(t0, tf, int(fps * (tf - t0)))
animation = FuncAnimation(fig, update, frames=frames, interval=1000 / fps)
plt.show()
WARNING:matplotlib.animation:MovieWriter ffmpeg unavailable; using Pillow instead.
Total running time of the script: (2 minutes 35.680 seconds)