Note
Go to the end to download the full example code.
Mixed State-Control Constraints (betts-10-113)¶
This is example 10.113 from John T. Betts, Practical Methods for Optimal Control Using NonlinearProgramming, 3rd edition, Chapter 10: Test Problems.
More details are in section 4.14, example 4.10 of the book.
States
\(y_1, y_2\) : state variables
Controls
\(u\) : control variable
import numpy as np
import sympy as sm
import sympy.physics.mechanics as me
import time
from opty.direct_collocation import Problem
from opty.utils import create_objective_function, MathJaxRepr
Equations of Motion¶
t = me.dynamicsymbols._t
# Parameter
p = 0.14
y1, y2 = me.dynamicsymbols('y1, y2')
u = me.dynamicsymbols('u')
eom = sm.Matrix([
-y1.diff(t) + y2,
-y2.diff(t) - y1 + y2*(1.4 - p * y2**2) + 4 * u,
u + y1/6
])
MathJaxRepr(eom)
Define and Solve the Optimization Problem¶
num_nodes = 10001
t0, tf = 0.0, 4.5
interval_value = (tf - t0) / (num_nodes - 1)
state_symbols = (y1, y2)
unkonwn_input_trajectories = (u,)
Specify the objective function and form the gradient.
objective = sm.Integral(u**2 + y1**2, t)
obj, obj_grad = create_objective_function(
objective,
state_symbols,
unkonwn_input_trajectories,
tuple(),
num_nodes,
interval_value
)
instance_constraints = (
y1.func(t0) + 5,
y2.func(t0) + 5,
)
Bound for the algebraic eom.
eom_bounds = {2: (-np.inf, 0.0)}
Set up Problem
prob = Problem(
obj,
obj_grad,
eom,
state_symbols,
num_nodes,
interval_value,
instance_constraints=instance_constraints,
eom_bounds=eom_bounds,
time_symbol=t,
)
Rough initial guess
initial_guess = np.ones(prob.num_free) * 0.1
Find the optimal solution.
start = time.time()
solution, info = prob.solve(initial_guess)
print(f"Solved in {time.time() - start:.2f} seconds.")
print(info['status_msg'])
Jstar = 44.8044433
print(f"Objective value achieved: {info['obj_val']:.4f}, as per the book "
f"it is {Jstar}, so the difference to the value in the book is: "
f"{(-info['obj_val'] + Jstar) / Jstar * 100:.3f} % ")
Solved in 3.68 seconds.
b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Objective value achieved: 44.7911, as per the book it is 44.8044433, so the difference to the value in the book is: 0.030 %
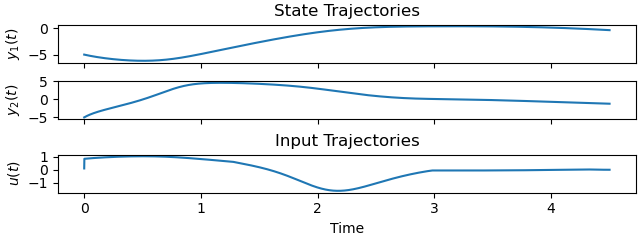
Plot the optimal state and input trajectories.
_ = prob.plot_trajectories(solution)
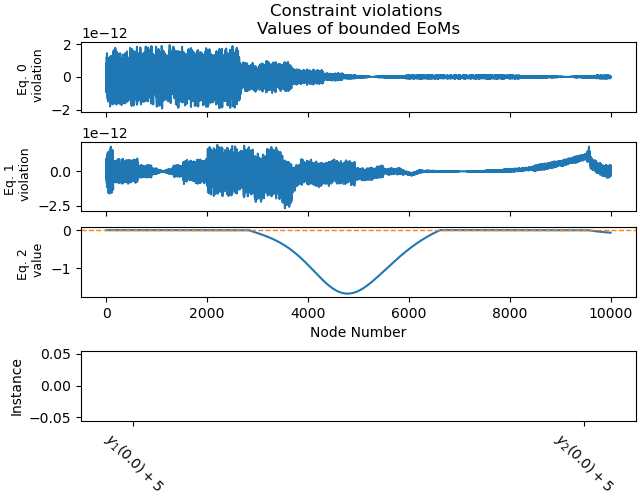
Plot the constraint violations.
_ = prob.plot_constraint_violations(solution, subplots=True, show_bounds=True)
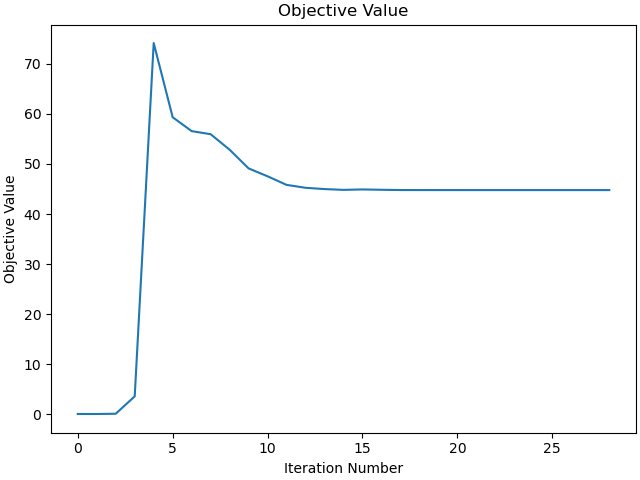
Plot the objective function.
_ = prob.plot_objective_value()
Total running time of the script: (0 minutes 11.906 seconds)