Note
Go to the end to download the full example code.
Particle on Numerical Surface¶
Objectives¶
Show how to handle a numerical approximation of a function depending on more than one variable.
Show how to handle derivatives of this numerical function when they appear in the equations of motion.
Description¶
A particle of mass \(m\) can slide on a surface described by a function
\(\textrm{street}(x, y)\). The position of the particle is given by the
coordinates \((x, y, \textrm{street}(x, y))\) in 3D space. The particle
is subject to gravitation and speed dependent friction. A force
\(\begin{pmatrix} f_x \\ f_y \\ f_z \end{pmatrix}\) acts on the particle,
selected by opty. The goal is to go from A to B as fast as possible using
minimal energy. The relative weight of speed vs. saving is determined by
weight.
Explanations¶
Two sympy functions street_x(x) and street_y(y) are defined. They describe the same surface, but in street_x(x) x are considered variables and y are considered parameters - and vice versa.
Higher derivatives of street_x and street_y appear in the equations of motion. They are replaced by additional sympy functions like \(\dfrac{d}{dx} street_x(x) = \textrm{dstreet_x}(x)\) and \(\dfrac{d}{dy} street_y(y) = \textrm{dstreet_y}(y)\), etc.
For every numerical function given,
optyneeds it derivate w.r.t the variable. In this example \(\dfrac{d^3}{dx^3} street_x(x)\) and \(\dfrac{d^3}{dy^3} street_y(y)\) are needed. In a real world situation they would be the results of measurements.
States
\(x, y\) : coordinates of the particle
\(u_x, u_y\) : velocities of the particle
Parameters - \(m\) : mass of the particle - \(g\) : gravitational acceleration - \(\mu\) : speed dependentfriction coefficient - \(\omega_1, \omega_2\) : angular frequencies - \(a\) : amplitude
Controls - \(f_x, f_y, f_z\) : forces acting on the particle
Others
\(\textrm{street_x}(x), \textrm{street_y}(y)\) : numerical functions
\(\textrm{dstreet}_x\) : \(\dfrac{d}{dx} \textrm{street_x}(x)\)
\(\textrm{dstreet}_y\) : \(\dfrac{d}{dy} \textrm{street_y}(y)\)
\(\textrm{ddstreet}_x\) : \(\dfrac{d^2}{dx^2} \textrm{street_x}(x)\)
\(\textrm{ddstreet}_y\) : \(\dfrac{d^2}{dy^2} \textrm{street_y}(y)\)
\(\textrm{dddstreet}_x\) : \(\dfrac{d^3}{dx^3} \textrm{street_x}(x)\)
\(\textrm{dddstreet}_y\) : \(\dfrac{d^3}{dy^3} \textrm{street_y}(y)\)
import numpy as np
import sympy as sm
import sympy.physics.mechanics as me
import matplotlib.pyplot as plt
from opty import Problem
from scipy.interpolate import CubicSpline
from matplotlib.animation import FuncAnimation
Kane’s Method¶
N = me.ReferenceFrame('N')
O, P = sm.symbols('O P', cls=me.Point)
t = me.dynamicsymbols._t
O.set_vel(N, 0)
P.set_vel(N, 0)
x, y, ux, uy = me.dynamicsymbols('x y u_x u_y')
street_x = sm.Function('street_x')(x)
street_y = sm.Function('street_y')(y)
dstreet_x = sm.Function('dstreet_x')(x)
dstreet_y = sm.Function('dstreet_y')(y)
ddstreet_x = sm.Function('ddstreet_x')(x)
ddstreet_y = sm.Function('ddstreet_y')(y)
Needed to replace derivatives in equations of motion with ‘new’ functions
street_dict = {
street_x.diff(x): dstreet_x,
street_y.diff(y): dstreet_y,
street_x.diff(x, 2): ddstreet_x,
street_y.diff(y, 2): ddstreet_y
}
fx, fy, fz = me.dynamicsymbols('f_x f_y f_z')
m, g, mu = sm.symbols('m g mu', real=True)
# As street_x, street_y describe the same surface, it does not matter which
# one is used here
P.set_pos(O, x * N.x + y * N.y + street_x * N.z)
# The speed in z direction is d/dt(surface(x, y)) = d/dt(street_x(x)) * ux +
# d/dt(street_y(y)) * uy
P.set_vel(N, ux * N.x + uy * N.y + (street_x.diff(x) * ux +
street_y.diff(y) * uy) * N.z)
body = me.Particle('body', P, m)
bodies = [body]
force = [(P, fx * N.x + fy * N.y + fz * N.z - m * g * N.z - mu * P.vel(N))]
kd = sm.Matrix([ux - x.diff(t), uy - y.diff(t)])
q_ind = [x, y]
u_ind = [ux, uy]
KM = me.KanesMethod(N, q_ind, u_ind, kd)
fr, frstar = KM.kanes_equations(bodies, force)
eoms = me.msubs(kd.col_join(fr + frstar), street_dict)
print('eom dynamic symbols: ', me.find_dynamicsymbols(eoms), '\n')
print(F'eoms have {sm.count_ops(eoms)} operations')
eom dynamic symbols: {u_x(t), ddstreet_y(y(t)), f_y(t), Derivative(u_y(t), t), f_z(t), y(t), dstreet_x(x(t)), Derivative(u_x(t), t), f_x(t), ddstreet_x(x(t)), Derivative(y(t), t), Derivative(x(t), t), u_y(t), dstreet_y(y(t)), x(t)}
eoms have 122 operations
Set Up the Optimisation and Solve It¶
h = sm.symbols('h', real=True)
num_nodes = 201
t0, tf = 0.0, (num_nodes - 1) * h
interval_value = h
state_symbols = [x, y, ux, uy]
Define the various functions needed in the known_trajectory_map. In a real situation they would be the results of measurements.
a, omega1, omega2 = sm.symbols('a omega_1 omega_2', real=True)
def strasse(x, y, a, omega1, omega2):
return a * (sm.sin(omega1 * x) * sm.sin(omega2 * y))
par_map = {
m: 1.0,
g: 9.81,
mu: 0.1,
omega1: 2.0 * np.pi / 17.0,
omega2: 2.0 * np.pi / 25.0,
a: 4.0
}
street_xx = strasse(x, y, a, omega1, omega2)
street_yy = strasse(x, y, a, omega1, omega2)
dstreet_xx = street_xx.diff(x)
dstreet_yy = street_yy.diff(y)
ddstreet_xx = dstreet_xx.diff(x)
ddstreet_yy = dstreet_yy.diff(y)
dddstreet_xx = ddstreet_xx.diff(x)
dddstreet_yy = ddstreet_yy.diff(y)
x_meas = np.linspace(-10, 10, 1000)
y_meas = np.linspace(-10, 10, 1000)
street_x_lam = sm.lambdify((x, y), street_xx.subs(par_map), cse=True)
street_y_lam = sm.lambdify((x, y), street_yy.subs(par_map), cse=True)
dstreet_x_lam = sm.lambdify((x, y), dstreet_xx.subs(par_map), cse=True)
ddstreet_x_lam = sm.lambdify((x, y), ddstreet_xx.subs(par_map), cse=True)
dstreet_y_lam = sm.lambdify((x, y), dstreet_yy.subs(par_map), cse=True)
ddstreet_y_lam = sm.lambdify((x, y), ddstreet_yy.subs(par_map), cse=True)
dddstreet_x_lam = sm.lambdify((x, y), dddstreet_xx.subs(par_map), cse=True)
dddstreet_y_lam = sm.lambdify((x, y), dddstreet_yy.subs(par_map), cse=True)
street_x_meas = street_x_lam(x_meas, y_meas)
street_y_meas = street_y_lam(x_meas, y_meas)
dstreet_x_meas = dstreet_x_lam(x_meas, y_meas)
ddstreet_x_meas = ddstreet_x_lam(x_meas, y_meas)
dstreet_y_meas = dstreet_y_lam(x_meas, y_meas)
ddstreet_y_meas = ddstreet_y_lam(x_meas, y_meas)
dddstreet_x_meas = dddstreet_x_lam(x_meas, y_meas)
dddstreet_y_meas = dddstreet_y_lam(x_meas, y_meas)
def calc_street_x(free):
x = free[0: num_nodes]
return np.interp(x, x_meas, street_x_lam(x_meas, y_meas))
def calc_street_y(free):
y = free[num_nodes: 2 * num_nodes]
return np.interp(y, x_meas, street_y_lam(x_meas, y_meas))
def calc_dstreet_x(free):
x = free[0: num_nodes]
return np.interp(x, x_meas, dstreet_x_lam(x_meas, y_meas))
def calc_dstreet_y(free):
y = free[num_nodes: 2 * num_nodes]
return np.interp(y, x_meas, dstreet_y_lam(x_meas, y_meas))
def calc_ddstreet_x(free):
x = free[0: num_nodes]
return np.interp(x, x_meas, ddstreet_x_lam(x_meas, y_meas))
def calc_ddstreet_y(free):
y = free[num_nodes: 2 * num_nodes]
return np.interp(y, x_meas, ddstreet_y_lam(x_meas, y_meas))
def calc_dddstreet_x(free):
x = free[0: num_nodes]
return np.interp(x, x_meas, dddstreet_x_lam(x_meas, y_meas))
def calc_dddstreet_y(free):
y = free[num_nodes: 2 * num_nodes]
return np.interp(y, x_meas, dddstreet_y_lam(x_meas, y_meas))
Finish setting up the optimization problem.
instance_constraints = [
x.func(t0) + 9.0,
y.func(t0) + 9.0,
ux.func(t0),
uy.func(t0),
# values on fx, fy, fz to avoid division by zero warning when plotting.
fx.func(t0) - 1.e-10,
fy.func(t0) - 1.e-10,
fz.func(t0) - 1.e-10,
x.func(tf) - 9.0,
y.func(tf) - 9.0,
ux.func(tf),
uy.func(tf),
]
limit = 20.0
bounds = {
fx: (-limit, limit),
fy: (-limit, limit),
fz: (-limit, limit),
h: (0.0, 0.5),
}
weight = 900
def obj(free):
summe = (np.sum(free[4 * num_nodes: 7 * num_nodes]**2) * free[-1] +
weight * free[-1])
return summe
def obj_grad(free):
grad = np.zeros_like(free)
grad[4 * num_nodes: 7 * num_nodes] = 2.0 * free[4 * num_nodes: 7 *
num_nodes] * free[-1]
grad[-1] = np.sum(free[4 * num_nodes: 7 * num_nodes]**2) + weight
return grad
prob = Problem(
obj,
obj_grad,
eoms,
state_symbols,
num_nodes,
interval_value,
known_parameter_map=par_map,
known_trajectory_map={
street_x: calc_street_x,
street_x.diff(x): calc_dstreet_x,
street_y: calc_street_y,
street_y.diff(y): calc_dstreet_y,
dstreet_x: calc_dstreet_x,
dstreet_x.diff(x): calc_ddstreet_x,
dstreet_y: calc_dstreet_y,
dstreet_y.diff(y): calc_ddstreet_y,
ddstreet_x: calc_ddstreet_x,
ddstreet_x.diff(x): calc_dddstreet_x,
ddstreet_y: calc_ddstreet_y,
ddstreet_y.diff(y): calc_dddstreet_y,
},
instance_constraints=instance_constraints,
bounds=bounds,
time_symbol=t,
# backend='numpy',
)
Solve the optimization problem.
initial_guess = np.zeros(prob.num_free)
x_guess = np.linspace(-8.0, 8.0, num_nodes)
y_guess = np.linspace(-8.0, 8.0, num_nodes)
initial_guess[0:num_nodes] = x_guess # x
initial_guess[num_nodes:2 * num_nodes] = y_guess # y
initial_guess[-1] = 0.01 # h
prob.add_option('max_iter', 6000)
solution, info = prob.solve(initial_guess)
initial_guess = solution
print(info['status_msg'])
print(info['obj_val'])
b'Algorithm stopped at a point that was converged, not to "desired" tolerances, but to "acceptable" tolerances (see the acceptable-... options).'
320.1878509073637
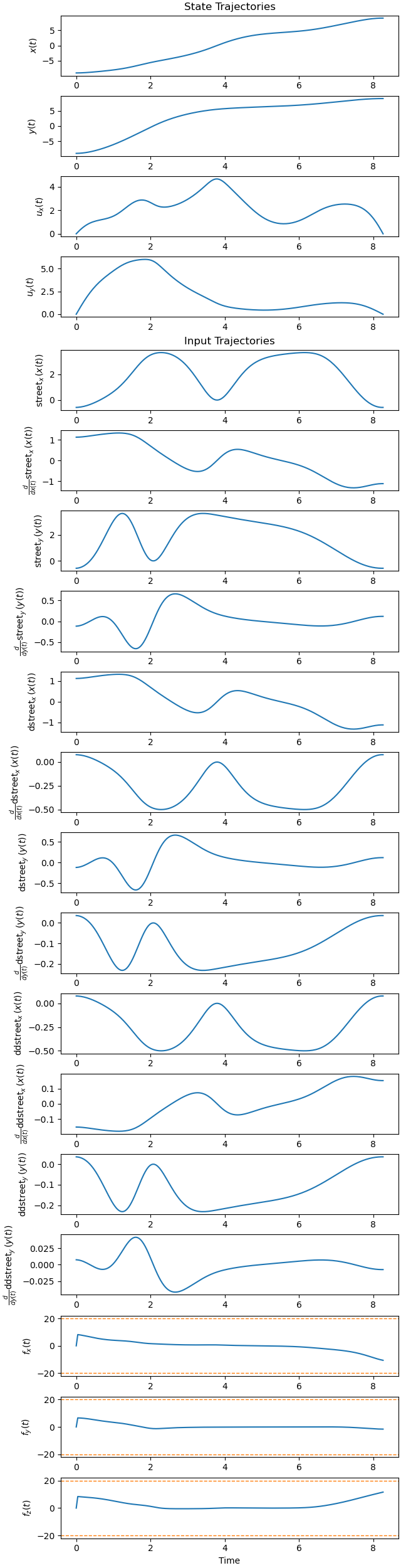
Plot trajectories.
fig, ax = plt.subplots(19, 1, figsize=(6.4, 25), layout='constrained')
_ = prob.plot_trajectories(solution, axes=ax, show_bounds=True)
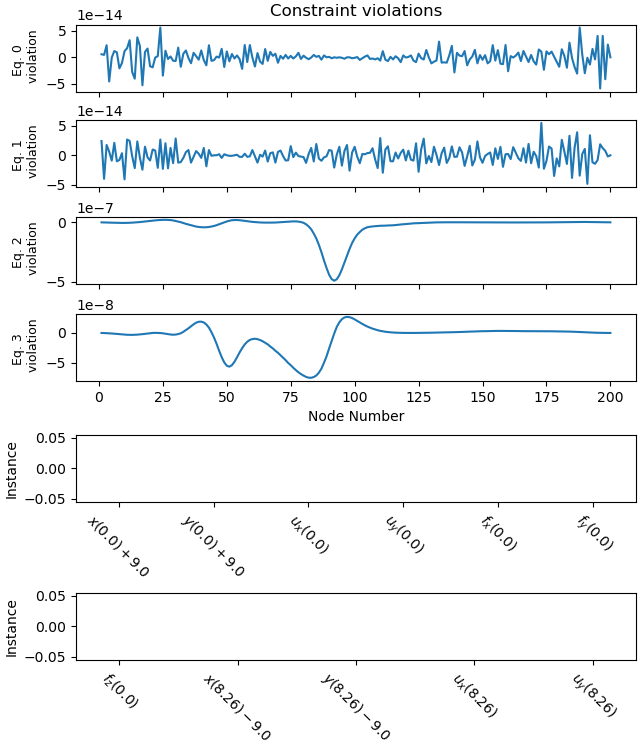
Plot errors.
_ = prob.plot_constraint_violations(solution, subplots=True)
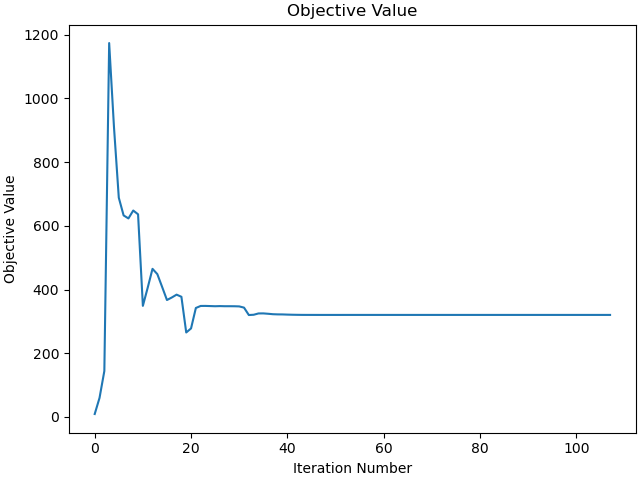
Plot objective value.
_ = prob.plot_objective_value()
Animation¶
fps = 2.5
street_lam = street_x_lam
state_vals, input_vals, _, h_vals = prob.parse_free(solution)
tf = h_vals * (num_nodes - 1)
t_arr = np.linspace(t0, tf, num_nodes)
state_sol = CubicSpline(t_arr, state_vals.T)
input_sol = CubicSpline(t_arr, input_vals.T)
# end points of the force
Fbq, Fbz = me.Point('Fbq'), me.Point('Fbz')
sx, sy = sm.symbols('sx, sy', real=True)
Fbq.set_pos(P, fx * N.x + fy * N.y)
# A unit vector normal to fx * N.x + fy * N.y is
# v = (fy, -fx) * 1 / sqrt(fx**2 + fy**2)
Fbz.set_pos(P, fz / sm.sqrt(fx**2 + fy**2) * (fy * N.x - fx * N.y))
coordinates = P.pos_from(O).to_matrix(N)
coordinates = coordinates.row_join(Fbq.pos_from(O).to_matrix(N))
coordinates = coordinates.row_join(Fbz.pos_from(O).to_matrix(N))
coordinates = coordinates.subs({street_x: sx, street_y: sy})
pL, pL_vals = zip(*par_map.items())
coords_lam = sm.lambdify((*state_symbols, fx, fy, fz, sx, sy, *pL),
coordinates, cse=True)
def init():
xmin, xmax = -10., 10.
ymin, ymax = -10, 10
fig = plt.figure(figsize=(8, 8))
ax = fig.add_subplot(111)
ax.set_xlim(xmin, xmax)
ax.set_ylim(ymin, ymax)
ax.set_aspect('equal')
ax.grid()
# Create grid of x, y points
X, Y = np.meshgrid(x_meas, y_meas)
Z = street_x_lam(X, Y) # Calculate z values using the street function
# Plot the colored surface
ax.pcolormesh(X, Y, Z, shading='auto', cmap='inferno')
c = ax.imshow(Z, extent=[x_meas.min(), x_meas.max(), y_meas.min(),
y_meas.max()], origin='lower', cmap='inferno',
aspect='auto')
fig.colorbar(c, ax=ax, label="height of surface [m]")
line1 = ax.scatter(-8.0, -8.0, color='blue', s=50)
pfeil = ax.quiver([], [], [], [], color='green', scale=10,
width=0.004, headwidth=8)
pfeil_z = ax.quiver([], [], [], [], color='red', scale=10,
width=0.004, headwidth=8)
return fig, ax, line1, pfeil, pfeil_z
# Function to update the plot for each animation frame
fig, ax, line1, pfeil, pfeil_z = init()
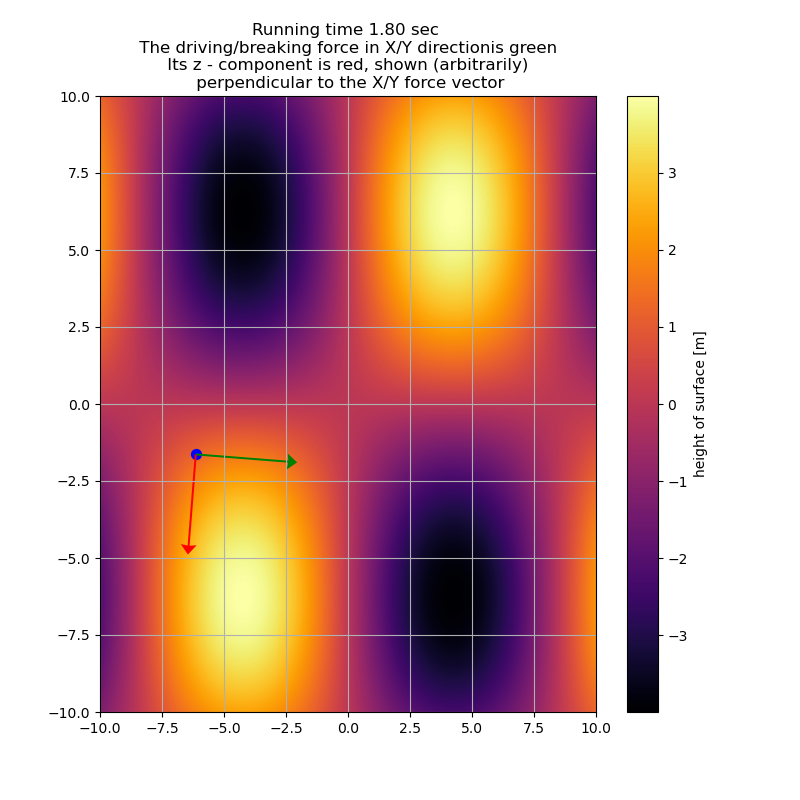
def update(t):
message = ((f'Running time {t:.2f} sec \n '
f'The driving/breaking force in X/Y directionis green \n '
f'Its z - component is red, shown (arbitrarily) \n '
f'perpendicular to the X/Y force vector'))
ax.set_title(message, fontsize=12)
sx = street_x_lam(*state_sol(t)[0: 2])
sy = sx
coords = coords_lam(*state_sol(t), *input_sol(t), sx, sy, *pL_vals)
line1.set_offsets([coords[0, 0], coords[1, 0]])
pfeil.set_offsets([coords[0, 0], coords[1, 0]])
pfeil.set_UVC(coords[0, 1] - coords[0, 0], coords[1, 1] - coords[1, 0])
pfeil_z.set_offsets([coords[0, 0], coords[1, 0]])
pfeil_z.set_UVC(coords[0, 2] - coords[0, 0], coords[1, 2] - coords[1, 0])
frames = np.linspace(t0, tf, int(fps * (tf - t0)))
animation = FuncAnimation(fig, update, frames=frames, interval=1000/fps)
fig, ax, line1, pfeil, pfeil_z = init()
update(1.8)
plt.show()
Total running time of the script: (0 minutes 41.260 seconds)