Note
Go to the end to download the full example code.
Two Ellipses Bouncing on a Wavy Street¶
Objectives¶
Show to use LineProfiler to check CPU time usage of functions.
Show different methods to find the points of least distance between two bodies with smooth contours.
Description¶
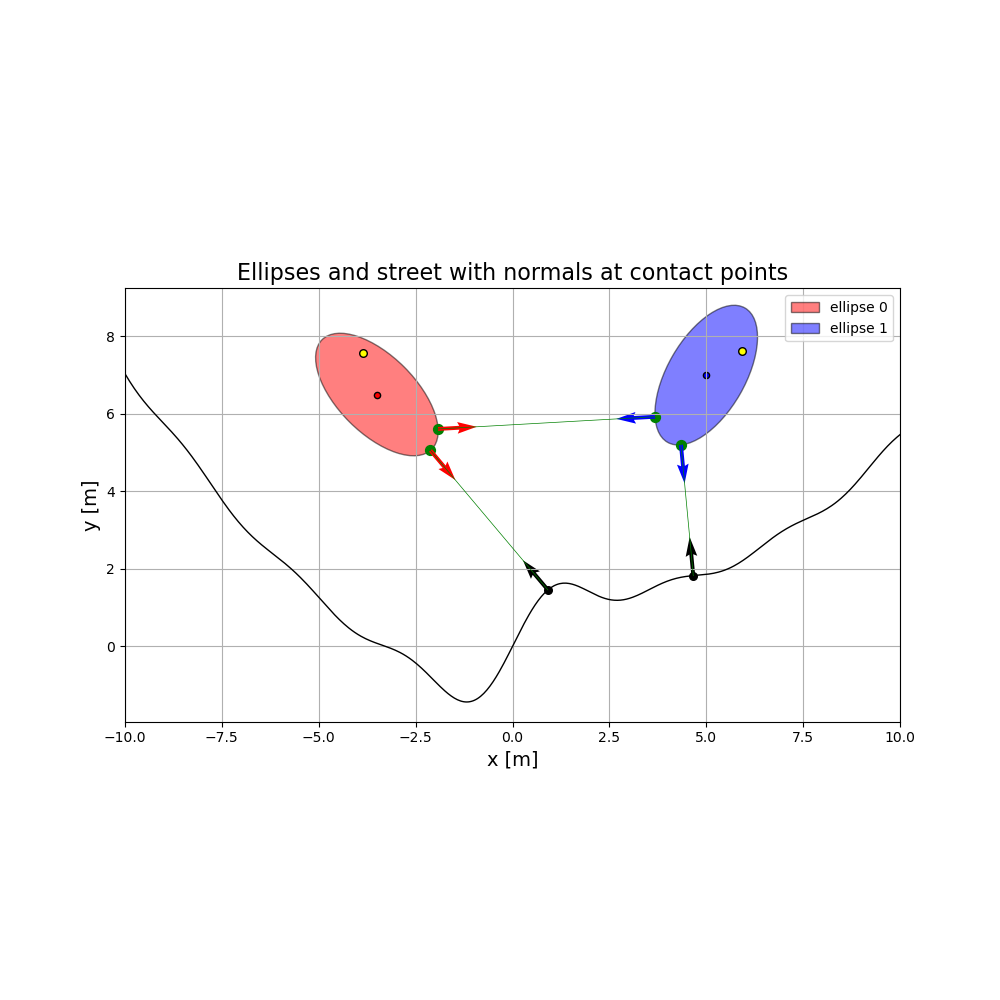
Two homogenious ellipses of semi-radii \(a\) and \(b\) and mass \(m_e\) are dropped on an uneven street. Upon contact with the street or with each other, a force proportional to the penetration depth is applied, with spring constant \(k_{\textrm{spring}}\). (That is the shapes of the bodies are not considered. This could be done with Hunt-Crossley’s method and is shown in other examples.) Also a speed dependent friction force is applied, with friction coefficient \(\mu\). A particle of mass \(m_o\) is placed on each ellipse.
Finding the points of least distance¶
Brute Force. Select \(\textrm{accuracy}\) points on the hull of each body (e.g. \(\textrm{ellipse}_0\) and \(\textrm{ellipse}_1\)), calculate the distance between each pair of points and select the two points with minimum distance. For \(\textrm{accuracy}\) large enough, this should be close to the global minimum of the distance function. However, calculation is costly, it scales with \(\textrm{accuracy}^2\).
Minimization. Use a minimization algorithm to find the minimum of the distance function. This is fast, but it may converge to a local minimum, depending on the initial guess and the distance function.
Root finding. A necessary (but not sufficient) condition for \(P_0, P_1\) to be the points of least distance is that the gradient of the distance function is zero at these points. This is fast and accurate, but again it may converge to a local minimum, depending on the initial guess.
Notes¶
The distance between the two ellipses depends continuously on the the positions of the ellipses. Hence here the result of the previous time step is used as initial guess for the minimization and that result is used for root to get still more accuracy.
The distance between ellipses and the street is not continuous, hence here the brute force method is used to get an initial guess for minimization and root finding.
Any of the above only work when the bodies are not penetrating. When they do, one of the intersection points will be found. Here a trick is used: The distance to a ‘smaller’ body is calculated. If the distance is less than a certain cut-off, penetration is assumed and the penetration depth is calculated.
LineProfilercan show where the most CPU time is used in a function. it is used here on the r.h.s of the differential equations \(\dot{y} = f(y, \textrm{parameters})\). It shows that brute force is the costliest operation. It may be installed withconda install conda-forge::spyder-line-profilersymjitis a new (as of August 2025) package similar tolambdify. In this simulation it can be used for brute force and it is about twice as fast aslambdify. It may be installed withconda install conda-forge::symjit
States
\(q_0, q_1\) : Angles of the ellipses
\(x_0, x_1\) : x-positions of the centers of gravity of the ellipses
\(y_0, y_1\) : y-positions of the centers of gravity of the ellipses
\(u_0, u_1\) : Angular velocities of the ellipses
\(u_{x0}, u_{x1}\) : x-velocities of the centers of gravity of the ellipses
\(u_{y0}, u_{y1}\) : y-velocities of the centers of gravity of the ellipses
Parameters
\(m_e\) : Mass of the ellipses
\(m_o\) : Mass of the particles on the ellipses
\(g\) : Gravitational acceleration
\(a, b\) : Semi-radii of the ellipses
\(k_{\textrm{spring}}\) : Spring constant for the contact forces
\(\textrm{amplitude}, \textrm{frequenz}\) : Parameters to model the street
\(\mu\) : Friction coefficient
import sympy as sm
import numpy as np
import matplotlib.pyplot as plt
import sympy.physics.mechanics as me
import itertools as itt
import time
from copy import deepcopy
from symjit import compile_func
from scipy.integrate import solve_ivp
from scipy.optimize import root, minimize
from scipy.interpolate import CubicSpline
from matplotlib.patches import Ellipse
from line_profiler import LineProfiler
from matplotlib.animation import FuncAnimation
This creates a decorator to test functions for usage of CPU time, line by line. To see the results, this line: profiler.print_stats() must be added.
profiler = LineProfiler()
def profile(func):
def inner(*args, **kwargs):
profiler.add_function(func)
profiler.enable_by_count()
return func(*args, **kwargs)
return inner
symjit or lambdify may be used for the brute search.
choose_symjit = True
Model the street.
rumpel = 5 # the higher the number the more 'uneven the street'
amplitude, frequenz, x = sm.symbols('amplitude, frequenz, x')
def gesamt1(x, amplitude, frequenz):
strasse = sum([amplitude/j * sm.sin(j*frequenz * x)
for j in range(1, rumpel)])
strassen_form = (frequenz/2. * x)**2
gesamt = strassen_form + strasse
return gesamt
street_lam = sm.lambdify(
(x, amplitude, frequenz), gesamt1(x, amplitude, frequenz), cse=True)
Geometry of the system
N, A0, A1 = sm.symbols('N A0 A1', cls=me.ReferenceFrame)
O = me.Point('O')
O.set_vel(N, 0)
t = me.dynamicsymbols._t
# Centers of gravity of the ellipses
Dmc0, Dmc1 = me.Point('Dmc0'), me.Point('Dmc1')
# Particle on the ellipses
Po0, Po1 = me.Point('Po0'), me.Point('Po1')
# Points of least distance on the ellipses
CPee0, CPee1 = me.Point('CPee0'), me.Point('CPee1')
# points of least distance on the street on the ellipses
CPes0, CPes1 = me.Point('CPes0'), me.Point('CPes1')
# Counter points on the street
CPse0, CPse1 = me.Point('CPse0'), me.Point('CPse1')
# Generalized coordinates of the ellipses
q0, q1, u0, u1, x0, x1, y0, y1, u0, u1, ux0, ux1, uy0, uy1 = me.dynamicsymbols(
'q0 q1 u0 u1 x0 x1 y0 y1 u0 u1 ux0 ux1 uy0 uy1')
# These angles describe the points where the distances are closest
angle_ee0, angle_ee1 = sm.symbols('angle_ee0 angle_ee1')
angle_street0, angle_street1 = sm.symbols('angle_street0 angle_street1')
X0, X1 = sm.symbols('X0 X1')
# a, b are the semi axes of the ellipses
m_e, m_o, g, a, b, k_spring, mu = sm.symbols('m_e m_o g a b k_spring mu')
pen_ee, pen_se0, pen_se1 = sm.symbols('pen_ee pen_se0 pen_se1')
# Orient the frames
A0.orient_axis(N, q0, N.z)
A0.set_ang_vel(N, u0 * N.z)
A1.orient_axis(N, q1, N.z)
A1.set_ang_vel(N, u1 * N.z)
Dmc0.set_pos(O, x0 * N.x + y0 * N.y)
Dmc0.set_vel(N, ux0 * N.x + uy0 * N.y)
Dmc1.set_pos(O, x1 * N.x + y1 * N.y)
Dmc1.set_vel(N, ux1 * N.x + uy1 * N.y)
Po0.set_pos(Dmc0, a/2 * A0.x + b/2 * A0.y)
Po0.v2pt_theory(Dmc0, N, A0)
Po1.set_pos(Dmc1, a/2 * A1.x + b/2 * A1.y)
Po1.v2pt_theory(Dmc1, N, A1)
CPee0.set_pos(Dmc0, a * sm.cos(angle_ee0) * A0.x +
b * sm.sin(angle_ee0) * A0.y)
CPee1.set_pos(Dmc1, a * sm.cos(angle_ee1) * A1.x +
b * sm.sin(angle_ee1) * A1.y)
CPes0.set_pos(Dmc0, a * sm.cos(angle_street0) * A0.x +
b * sm.sin(angle_street0) * A0.y)
CPes1.set_pos(Dmc1, a * sm.cos(angle_street1) * A1.x +
b * sm.sin(angle_street1) * A1.y)
CPse0.set_pos(O, X0 * N.x + gesamt1(X0, amplitude, frequenz) * N.y)
CPse1.set_pos(O, X1 * N.x + gesamt1(X1, amplitude, frequenz) * N.y)
Set initial conditions
q01 = np.deg2rad(45)
q11 = np.deg2rad(-30)
x01 = -3.5
x11 = 5.0
y01 = 6.5
y11 = 7.0
u01 = 4.0
u11 = -4.0
ux01 = 0.0
ux11 = 0.0
uy01 = 0.0
uy11 = 0.0
m_e1 = 1.0
m_o1 = 1.0
g1 = 9.81
a1 = 1.0
b1 = 2.0
k_spring1 = 5000.0
amplitude1 = 1.0
frequenz1 = 0.5
mu1 = 0.025
accuracy = 50
safety_factor = 1.e-2
y00 = [q01, q11, x01, x11, y01, y11, u01, u11, ux01, ux11, uy01, uy11]
pL_vals = [m_e1, m_o1, g1, a1, b1, k_spring1, amplitude1, frequenz1, mu1]
Get the distance between the two ellipses in three ways. Distance must be positive, else one of the intersection points will be found.
qL = [q0, q1, x0, x1, y0, y1, u0, u1, ux0, ux1, uy0, uy1]
pL = [m_e, m_o, g, a, b, k_spring, amplitude, frequenz, mu]
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
angle0, angle1 = sm.symbols('angle0 angle1')
# brute force search for minimum distance
search_space = list(itt.product(np.linspace(0, 2*np.pi, accuracy),
np.linspace(0, 2*np.pi, accuracy)))
def distance_func_ee(angle0, angle1):
Pe0.set_pos(Dmc0, a * sm.cos(angle0) * A0.x + b * sm.sin(angle0) * A0.y)
Pe1.set_pos(Dmc1, a * sm.cos(angle1) * A1.x + b * sm.sin(angle1) * A1.y)
distance = sm.sqrt(safety_factor**2 + Pe0.pos_from(Pe1).dot(N.x)**2 +
Pe0.pos_from(Pe1).dot(N.y)**2)
return distance
distance_ee_lam = sm.lambdify(([angle0, angle1] + qL + pL),
distance_func_ee(angle0, angle1), cse=True)
distance_array = np.array([distance_ee_lam(*([angle0, angle1] + y00 + pL_vals))
for angle0, angle1 in search_space])
min_distance = np.min(distance_array)
min_distance_index = np.argmin(distance_array)
angle_brute_0 = np.linspace(0, 2*np.pi, accuracy)[min_distance_index //
accuracy]
angle_brute_1 = np.linspace(0, 2*np.pi, accuracy)[min_distance_index %
accuracy]
# Search by minimizing the distance function.
def distance_minimizer(X00, args):
angle0, angle1 = X00
return distance_ee_lam(*([angle0, angle1] + args))
X00 = [0.0, 1.0]
args = y00 + pL_vals
loesung = minimize(distance_minimizer, X00, args, tol=1.e-6)
angle_min_0, angle_min_1 = loesung.x
print(loesung.message)
# Solve with gradient(distance) = 0
def distance_ee_grad(angle0, angle1):
Pe0.set_pos(Dmc0, a * sm.cos(angle0) * A0.x + b * sm.sin(angle0) * A0.y)
Pe1.set_pos(Dmc1, a * sm.cos(angle1) * A1.x + b * sm.sin(angle1) * A1.y)
grad = [sm.sqrt(safety_factor**2 + Pe0.pos_from(Pe1).dot(N.x)**2 +
Pe0.pos_from(Pe1).dot(N.y)**2).diff(angle)
for angle in (angle0, angle1)]
return grad
distance_ee_grad_lam = sm.lambdify(([angle0, angle1] + qL + pL),
distance_ee_grad(angle0, angle1), cse=True)
def equations_ee(X00, args):
angle0, angle1 = X00
return distance_ee_grad_lam(*([angle0, angle1] + args))
X00 = [angle_min_0, angle_min_1]
args = y00 + pL_vals
loesung = root(equations_ee, X00, args)
angle_root_0, angle_root_1 = loesung.x
print(loesung.message)
# 'Print the results to compare the three methods '
print('brute force. Distance', min_distance, 'angle01',
np.rad2deg(angle_brute_0), 'angle02 ', np.rad2deg(angle_brute_1))
print('minimization. Distance', distance_ee_lam(*(loesung.x.tolist() + args)),
'angle01', np.rad2deg(loesung.x[0]), 'angle02', np.rad2deg(loesung.x[1]))
print('root. Distance', distance_ee_lam(*(loesung.x.tolist() + args)),
'angle01', np.rad2deg(loesung.x[0]), 'angle02', np.rad2deg(loesung.x[1]))
Optimization terminated successfully.
The solution converged.
brute force. Distance 5.612321571257076 angle01 301.2244897959183 angle02 235.1020408163265
minimization. Distance 5.609102365412254 angle01 -60.7651534216529 angle02 -127.35808775141366
root. Distance 5.609102365412254 angle01 -60.7651534216529 angle02 -127.35808775141366
Get the distance between ellipse and street in three ways. Distance must be positive, else one of the points where they intersect will be found.
If the distance gets very close to zero, numerical problems araise with minimizer and with root. safety_factor is used so the argument in sqrt remains positive at all times.
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
street_point, angle_street = sm.symbols('street_point angle_street')
grenze = 25.0
# brute force search for minimum distance
search_space = list(itt.product(np.linspace(-grenze, grenze, accuracy),
np.linspace(0, 2*np.pi, accuracy)))
def distance_func0(street_point, angle_street):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc0, a * sm.cos(angle_street) * A0.x +
b * sm.sin(angle_street) * A0.y)
Pe1.set_pos(O, street_point * N.x + gesamt1(street_point,
amplitude, frequenz) * N.y)
distance = sm.sqrt(safety_factor**2 + (Pe0.pos_from(Pe1).dot(N.x))**2 +
(Pe0.pos_from(Pe1).dot(N.y))**2)
return distance
def distance_func1(street_point, angle_street):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc1, a * sm.cos(angle_street) * A1.x +
b * sm.sin(angle_street) * A1.y)
Pe1.set_pos(O, street_point * N.x + gesamt1(street_point,
amplitude, frequenz) * N.y)
distance = sm.sqrt(safety_factor**2 + (Pe0.pos_from(Pe1).dot(N.x))**2 +
(Pe0.pos_from(Pe1).dot(N.y))**2)
return distance
if not choose_symjit:
distance_lam = sm.lambdify(([street_point, angle_street] + qL + pL),
[distance_func0(street_point, angle_street),
distance_func1(street_point, angle_street)],
cse=True)
else:
helpers = [sm.symbols('helper'+str(i)) for i in range(len(qL))]
dict_qL = {qL[i]: helpers[i] for i in range(len(qL))}
args_ufunc = tuple([street_point, angle_street] + helpers + pL)
distance_lam = compile_func(
(args_ufunc), (distance_func0(street_point,
angle_street).subs(dict_qL),
distance_func1(street_point,
angle_street).subs(dict_qL)))
ellipse_street_brute = []
ellipse_street_min = []
ellipse_street_root = []
for i in range(2):
distance_array = np.array(
[distance_lam(*([street_point, angle_street] + y00 + pL_vals))[i]
for street_point, angle_street in search_space])
min_distance = np.min(distance_array)
min_distance_index = np.argmin(distance_array)
street_point_brute = np.linspace(
-grenze, grenze, accuracy)[min_distance_index // accuracy]
angle_street_brute = np.linspace(
0, 2*np.pi, accuracy)[min_distance_index % accuracy]
ellipse_street_brute.append([street_point_brute, angle_street_brute])
# Search by minimizing the distance function.
def distance_minimizer(X00, args):
street_point, angle_street = X00
return distance_lam(*([street_point, angle_street] + args))[i]
X00 = [0.0, 1.0]
args = y00 + pL_vals
loesung = minimize(distance_minimizer, X00, args, tol=1.e-6)
street_point_min, angle_street_min = loesung.x
print(loesung.message)
ellipse_street_min.append([street_point_min, angle_street_min])
# Solve with gradient(distance) = 0
def distance_grad0(street_point, angle_street):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc0, a * sm.cos(angle_street) * A0.x +
b * sm.sin(angle_street) * A0.y)
Pe1.set_pos(O, street_point * N.x + gesamt1(street_point,
amplitude, frequenz) * N.y)
grad = [sm.sqrt(safety_factor**2 + Pe0.pos_from(Pe1).dot(N.x)**2 +
Pe0.pos_from(Pe1).dot(N.y)**2).diff(angle)
for angle in (street_point, angle_street)]
return grad
def distance_grad1(street_point, angle_street):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc1, a * sm.cos(angle_street) * A1.x +
b * sm.sin(angle_street) * A1.y)
Pe1.set_pos(O, street_point * N.x + gesamt1(street_point,
amplitude, frequenz) * N.y)
grad = [sm.sqrt(safety_factor**2 + (Pe0.pos_from(Pe1).dot(N.x))**2 +
(Pe0.pos_from(Pe1).dot(N.y))**2).diff(angle)
for angle in (street_point, angle_street)]
return grad
distance_grad_lam = sm.lambdify(([street_point, angle_street] + qL + pL),
[distance_grad0(street_point, angle_street),
distance_grad1(street_point, angle_street)],
cse=True)
for i in range(2):
def equations(X00, args):
street_point, angle_street = X00
return distance_grad_lam(*([street_point, angle_street] + args))[i]
X00 = [ellipse_street_min[i][0], ellipse_street_min[i][1]]
args = y00 + pL_vals
loesung = root(equations, X00, args, method='hybr')
street_point_root, angle_street_root = loesung.x
print(loesung.message)
ellipse_street_root.append([street_point_root, angle_street_root])
print('\n')
print(f"{' ' * 5} street point angles01{' ' * 25} street point angles02")
print('brute', ellipse_street_brute)
print('min', ellipse_street_min)
print('root', ellipse_street_root, '\n')
print(f'{" " * 5} Distance ellipse0 / street{" " * 10} ellipse1 / street')
print('Brute method:', distance_lam(*(ellipse_street_brute[0] + y00 +
pL_vals))[0], f"{' ' * 12}",
distance_lam(*(ellipse_street_brute[1] + y00 + pL_vals))[1])
print('Minimization:', distance_lam(*(ellipse_street_min[0] + y00 +
pL_vals))[0], f"{' ' * 12}",
distance_lam(*(ellipse_street_min[1] + y00 + pL_vals))[1])
print('Root method :', distance_lam(*(ellipse_street_root[0] + y00 +
pL_vals))[0], f"{' ' * 12}",
distance_lam(*(ellipse_street_root[1] + y00 + pL_vals))[1])
def distance_se0(street_point, angle_street):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc0, a * sm.cos(angle_street) * A0.x +
b * sm.sin(angle_street) * A0.y)
Pe1.set_pos(O, street_point * N.x + gesamt1(street_point,
amplitude, frequenz) * N.y)
distance = sm.sqrt(safety_factor**2 + (Pe0.pos_from(Pe1).dot(N.x))**2 +
(Pe0.pos_from(Pe1).dot(N.y))**2)
return distance
# Needed for some plotting
def distance_se1(street_point, angle_street):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc1, a * sm.cos(angle_street) * A1.x +
b * sm.sin(angle_street) * A1.y)
Pe1.set_pos(O, street_point * N.x + gesamt1(street_point,
amplitude, frequenz) * N.y)
distance = sm.sqrt(safety_factor**2 + (Pe0.pos_from(Pe1).dot(N.x))**2 +
(Pe0.pos_from(Pe1).dot(N.y))**2)
return distance
angle0, angle1 = sm.symbols('angle0 angle1')
def distance_ee(angle0, angle1):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc0, a * sm.cos(angle0) * A0.x + b * sm.sin(angle0) * A0.y)
Pe1.set_pos(Dmc1, a * sm.cos(angle1) * A1.x + b * sm.sin(angle1) * A1.y)
distance = sm.sqrt(safety_factor**2 + Pe0.pos_from(Pe1).dot(N.x)**2 +
Pe0.pos_from(Pe1).dot(N.y)**2)
return distance
dist_se0_lam = sm.lambdify(([street_point, angle_street] + qL + pL),
distance_se0(street_point, angle_street), cse=True)
dist_se1_lam = sm.lambdify(([street_point, angle_street] + qL + pL),
distance_se1(street_point, angle_street), cse=True)
dist_ee_lam = sm.lambdify(([angle0, angle1] + qL + pL),
distance_ee(angle0, angle1), cse=True)
Optimization terminated successfully.
Optimization terminated successfully.
The solution converged.
The solution converged.
street point angles01 street point angles02
brute [[np.float64(-7.653061224489797), np.float64(2.821021974652059)], [np.float64(6.632653061224492), np.float64(5.513815677729024)]]
min [[np.float64(0.9132003078523524), np.float64(-1.6136747450923836)], [np.float64(4.665630233442586), np.float64(-1.229539128485044)]]
root [[np.float64(0.9132003163761305), np.float64(-1.6136747285217004)], [np.float64(4.665630131256732), np.float64(-1.229538948998549)]]
Distance ellipse0 / street ellipse1 / street
Brute method: 3.793499732740891 3.189722871620561
Minimization: 4.705442356708569 3.3890251605755863
Root method : 4.705442356708568 3.3890251605755446
Calculate the scalar product of the two normal vectors, ellipse / ellipse and ellipse / street.
A necessary condition for the distance points (but by no means sufficient) is that the normal vectors to the surfaces of the two bodies be parallel. This is checked here.
Ellipse / Ellipse
def scalar_product_ee(angle0, angle1):
n0 = (sm.cos(angle0) * A0.x / a + sm.sin(angle0) * A0.y / b).normalize()
n1 = (sm.cos(angle1) * A1.x / a + sm.sin(angle1) * A1.y / b).normalize()
return n0.dot(n1)
scalar_ee_lam = sm.lambdify(
([angle0, angle1] + qL + pL), scalar_product_ee(angle0, angle1), cse=True)
names = ['brute', 'min', 'root']
for j, angles in enumerate(
[(angle_brute_0, angle_brute_1), (angle_min_0, angle_min_1),
(angle_root_0, angle_root_1)]):
scalar = scalar_ee_lam(*(list(angles) + y00 + pL_vals))
print(f'{names[j]} method: inner product ellipse / ellipse', scalar)
# Ellipse / street
def scalar_product_es0(street_point, angle_street):
n_ellipse = (sm.cos(angle_street) * A0.x / a +
sm.sin(angle_street) * A0.y / b).normalize()
tangent_street = (-gesamt1(street_point, amplitude, frequenz).diff(
street_point) * N.x + N.y).normalize()
return n_ellipse.dot(tangent_street)
def scalar_product_es1(street_point, angle_street):
n_ellipse = (sm.cos(angle_street) * A1.x / a +
sm.sin(angle_street) * A1.y / b).normalize()
tangent_street = (-gesamt1(street_point, amplitude, frequenz).diff(
street_point) * N.x + N.y).normalize()
return n_ellipse.dot(tangent_street)
scalar_es_lam = sm.lambdify(
([street_point, angle_street] + qL + pL),
[scalar_product_es0(street_point, angle_street),
scalar_product_es1(street_point, angle_street)], cse=True)
print('\n')
for i in range(2):
for j, angles in enumerate([
(ellipse_street_brute[i][0], ellipse_street_brute[i][1]),
(ellipse_street_min[i][0], ellipse_street_min[i][1]),
(ellipse_street_root[i][0], ellipse_street_root[i][1])]):
scalar = scalar_es_lam(*(list(angles) + y00 + pL_vals))[i]
print(f'{names[j]} method: inner product ellipse{i} / street', scalar)
brute method: inner product ellipse / ellipse -0.9999966468889012
min method: inner product ellipse / ellipse -0.9999999999996061
root method: inner product ellipse / ellipse -1.0000000000000002
brute method: inner product ellipse0 / street -0.9997114565375054
min method: inner product ellipse0 / street -0.999999999999999
root method: inner product ellipse0 / street -1.0000000000000002
brute method: inner product ellipse1 / street -0.9986835527376923
min method: inner product ellipse1 / street -0.9999999999999677
root method: inner product ellipse1 / street -0.9999999999999999
Penetration depth.
Here a trick is used: If the distance is less than cut_off, penetration is assumed. In other words, the distance to a ‘smaller’ body is calculated.
# Ellipse / ellipse penetration depth
cut_off = 0.4
def penetration_ee(angle0, angle1):
Pe, Pj = sm.symbols('Pe Pj', cls=me.Point)
Pe.set_pos(Dmc0, a * sm.cos(angle0) * A0.x + b * sm.sin(angle0) * A0.y)
Pj.set_pos(Dmc1, a * sm.cos(angle1) * A1.x + b * sm.sin(angle1) * A1.y)
distance = sm.sqrt(safety_factor**2 + Pe.pos_from(Pj).dot(N.x)**2 +
Pe.pos_from(Pj).dot(N.y)**2)
factor = sm.Piecewise((1, distance - cut_off < 0), (0, True))
penetration = factor * (cut_off - distance)
return penetration
def penetration_es0(street_point, angle_street):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc0, a * sm.cos(angle_street) * A0.x +
b * sm.sin(angle_street) * A0.y)
Pe1.set_pos(O, street_point * N.x + gesamt1(street_point,
amplitude, frequenz) * N.y)
distance = sm.sqrt(safety_factor**2 + Pe0.pos_from(Pe1).dot(N.x)**2 +
Pe0.pos_from(Pe1).dot(N.y)**2)
factor = sm.Piecewise((1, distance - cut_off < 0), (0, True))
penetration = factor * (cut_off - distance)
return penetration
def penetration_es1(street_point, angle_street):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc1, a * sm.cos(angle_street) * A1.x +
b * sm.sin(angle_street) * A1.y)
Pe1.set_pos(O, street_point * N.x + gesamt1(street_point,
amplitude, frequenz) * N.y)
distance = sm.sqrt(safety_factor**2 + Pe0.pos_from(Pe1).dot(N.x)**2 +
Pe0.pos_from(Pe1).dot(N.y)**2)
factor = sm.Piecewise((1, distance - cut_off <= 0), (0, True))
penetration = factor * (cut_off - distance)
return penetration
pen_es_lam0 = sm.lambdify(
([street_point, angle_street] + qL + pL),
penetration_es0(street_point, angle_street), cse=True)
pen_es_lam1 = sm.lambdify(
([street_point, angle_street] + qL + pL),
penetration_es1(street_point, angle_street), cse=True)
pen_ee_lam = sm.lambdify(([angle0, angle1] + qL + pL),
penetration_ee(angle0, angle1), cse=True)
for j, angles in enumerate(
[(angle_brute_0, angle_brute_1), (angle_min_0, angle_min_1),
(angle_root_0, angle_root_1)]):
pen = pen_ee_lam(*(list(angles) + y00 + pL_vals))
print(f'{names[j]} method: penetration depth ellipse / ellipse', pen)
print('\n')
for i in range(2):
for j, angles in enumerate(
[(ellipse_street_brute[i][0], ellipse_street_brute[i][1]),
(ellipse_street_min[i][0], ellipse_street_min[i][1]),
(ellipse_street_root[i][0], ellipse_street_root[i][1])]):
pen = [pen_es_lam0, pen_es_lam1][i](*(list(angles) + y00 + pL_vals))
print(f'{names[j]} method: penetration depth ellipse{i} / street', pen)
brute method: penetration depth ellipse / ellipse -0.0
min method: penetration depth ellipse / ellipse -0.0
root method: penetration depth ellipse / ellipse -0.0
brute method: penetration depth ellipse0 / street -0.0
min method: penetration depth ellipse0 / street -0.0
root method: penetration depth ellipse0 / street -0.0
brute method: penetration depth ellipse1 / street -0.0
min method: penetration depth ellipse1 / street -0.0
root method: penetration depth ellipse1 / street -0.0
Forces acting on the ellipses, due to elasticity (Spring)
def force_ee(angle0, pen_ee):
n0 = (sm.cos(angle0) * A0.x / a + sm.sin(angle0) * A0.y / b).normalize()
f_Nx = k_spring * pen_ee * n0.dot(N.x)
f_Ny = k_spring * pen_ee * n0.dot(N.y)
return f_Nx, f_Ny
def force_es0(X0, pen_se0):
no = (-gesamt1(X0, amplitude, frequenz).diff(
X0) * N.x + N.y).normalize()
f_Nx = k_spring * pen_se0 * no.dot(N.x)
f_Ny = k_spring * pen_se0 * no.dot(N.y)
return f_Nx, f_Ny
def force_es1(X1, pen_se1):
no = (-gesamt1(X1, amplitude, frequenz).diff(
X1) * N.x + N.y).normalize()
f_Nx = k_spring * pen_se1 * no.dot(N.x)
f_Ny = k_spring * pen_se1 * no.dot(N.y)
return f_Nx, f_Ny
Force due to speed dependent friction
def force_ee_friction(angle0, angle1, pen_ee):
Pe, Pj = sm.symbols('Pe Pj', cls=me.Point)
Pe.set_pos(Dmc0, a * sm.cos(angle0) * A0.x + b * sm.sin(angle0) * A0.y)
Pj.set_pos(Dmc1, a * sm.cos(angle1) * A1.x + b * sm.sin(angle1) * A1.y)
rel_speed = Pe.vel(N) - Pj.vel(N)
n0 = (sm.cos(angle0) * A0.x / a + sm.sin(angle0) * A0.y / b).normalize()
force_x, force_y = force_ee(angle0, pen_ee)
force_abs = sm.sqrt(force_x**2 + force_y**2)
n_force = n0.cross(N.z)
rel_speed_tangent = rel_speed.dot(n_force)
# safety:
factor = sm.Piecewise((1, pen_ee > 0), (0, True))
friction_force = mu * force_abs * rel_speed_tangent * n_force * factor
return friction_force.dot(N.x), friction_force.dot(N.y)
def force_es0_friction(X0, angle_street, pen_se0):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc0, a * sm.cos(angle_street) * A0.x +
b * sm.sin(angle_street) * A0.y)
Pe1.set_pos(O, X0 * N.x + gesamt1(X0, amplitude, frequenz) * N.y)
rel_speed = Pe0.vel(N)
no = (-gesamt1(X0, amplitude, frequenz).diff(
X0) * N.x + N.y).normalize()
force_x, force_y = force_es0(X0, pen_se0)
force_abs = sm.sqrt(force_x**2 + force_y**2)
n_force = no.cross(N.z)
rel_speed_tangent = rel_speed.dot(n_force)
# safety:
factor = sm.Piecewise((1, pen_se0 > 0), (0, True))
friction_force = -mu * force_abs * rel_speed_tangent * n_force * factor
return friction_force.dot(N.x), friction_force.dot(N.y)
def force_es1_friction(X1, angle_street, pen_se1):
Pe0, Pe1 = sm.symbols('Pe0 Pe1', cls=me.Point)
Pe0.set_pos(Dmc1, a * sm.cos(angle_street) * A1.x +
b * sm.sin(angle_street) * A1.y)
Pe1.set_pos(O, X1 * N.x + gesamt1(X1, amplitude, frequenz) * N.y)
rel_speed = Pe0.vel(N)
no = (-gesamt1(X1, amplitude, frequenz).diff(
X1) * N.x + N.y).normalize()
force_x, force_y = force_es1(X1, pen_se1)
force_abs = sm.sqrt(force_x**2 + force_y**2)
n_force = no.cross(N.z)
rel_speed_tangent = rel_speed.dot(n_force)
# safety:
factor = sm.Piecewise((1, pen_se1 > 0), (0, True))
friction_force = -mu * force_abs * rel_speed_tangent * n_force * factor
return friction_force.dot(N.x), friction_force.dot(N.y)
Plot the initial configuration.
# Ellipse / Ellipse
angle0_used, angle1_used = sm.symbols('angle0_used angle1_used')
arrow_ee0, arrow_ee1 = sm.symbols('arrow_ee0 arrow_ee1', cls=me.Point)
arrow_ee0.set_pos(CPee0, sm.cos(angle_ee0) * A0.x / a +
sm.sin(angle_ee0) * A0.y / b)
arrow_ee1.set_pos(CPee1, sm.cos(angle_ee1) * A1.x / a +
sm.sin(angle_ee1) * A1.y / b)
# Set the coordinates
coordinates = Dmc0.pos_from(O).to_matrix(N)
for point in (Dmc1, Po0, Po1, CPee0, CPee1, arrow_ee0, arrow_ee1):
coordinates = coordinates.row_join(point.pos_from(O).to_matrix(N))
coords_lam = sm.lambdify((qL + pL + [angle_ee0, angle_ee1]),
coordinates, cse=True)
angle0_used_val = angle_root_0
angle1_used_val = angle_root_1
coords = coords_lam(*(y00 + pL_vals + [angle0_used_val, angle1_used_val]))
# Street / ellipse
street_point_used, angle_street_used = sm.symbols(
'street_point_used angle_street_used')
arrow_es0, arrow_es1 = sm.symbols('arrow_es0 arrow_es1', cls=me.Point)
arrow_se0, arrow_se1 = sm.symbols('arrow_se0 arrow_se1', cls=me.Point)
arrow_es0.set_pos(CPes0, sm.cos(angle_street0) * A0.x / a +
sm.sin(angle_street0) * A0.y / b)
arrow_es1.set_pos(CPes1, sm.cos(angle_street1) * A1.x / a +
sm.sin(angle_street1) * A1.y / b)
arrow_se0.set_pos(
CPse0, -gesamt1(X0, amplitude, frequenz).diff(X0) * N.x + N.y)
arrow_se1.set_pos(CPse1, -gesamt1(
X1, amplitude, frequenz).diff(X1) * N.x + N.y)
coordinates = CPes0.pos_from(O).to_matrix(N)
for point in (CPes1, CPse0, CPse1, arrow_es0, arrow_es1, arrow_se0, arrow_se1):
coordinates = coordinates.row_join(point.pos_from(O).to_matrix(N))
coords_es_lam = sm.lambdify((qL + pL + [angle_street0, angle_street1, X0, X1]),
coordinates, cse=True)
angle_street0_used_val = ellipse_street_root[0][1]
angle_street1_used_val = ellipse_street_root[1][1]
X0_used_val = ellipse_street_root[0][0]
X1_used_val = ellipse_street_root[1][0]
coords_es = coords_es_lam(
*(y00 + pL_vals + [angle_street0_used_val, angle_street1_used_val,
X0_used_val, X1_used_val]))
fig, ax = plt.subplots(figsize=(10, 10))
ax.set_aspect('equal')
ellipse1 = Ellipse(
(coords[0, 0], coords[1, 0]), width=2*a1, height=2*b1,
angle=np.rad2deg(y00[0]), facecolor='red',
edgecolor='black', label=f'ellipse 0', alpha=0.5)
ax.add_patch(ellipse1)
ellipse2 = Ellipse(
(coords[0, 1], coords[1, 1]), width=2*a1, height=2*b1,
angle=np.rad2deg(y00[1]), edgecolor='black',
facecolor='blue', alpha=0.5, label=f'ellipse 1')
ax.add_patch(ellipse2)
# centers of the ellipses
ax.scatter([coords[0, 0]], [coords[1, 0]], color='red', edgecolors='black',
s=20)
ax.scatter([coords[0, 1]], [coords[1, 1]], color='blue', edgecolors='black',
s=20)
# particles on the ellipses
ax.scatter([coords[0, 2]], [coords[1, 2]], color='yellow', s=30,
edgecolors='black')
ax.scatter([coords[0, 3]], [coords[1, 3]], color='yellow', s=30,
edgecolors='black')
# points of least distance on the ellipses
ax.scatter([coords[0, 4]], [coords[1, 4]], color='green', s=50)
ax.scatter([coords[0, 5]], [coords[1, 5]], color='green', s=50)
# line connecting the points of least distance
ax.plot([coords[0, 4], coords[0, 5]], [coords[1, 4], coords[1, 5]],
color='green', linestyle='-', linewidth=0.5)
# normal vectors at the points of least distance
scala = 1.0 / (np.sqrt((coords[0, 6] - coords[0, 4])**2 +
(coords[1, 6] - coords[1, 4])**2))
ax.quiver(coords[0, 4], coords[1, 4], scala * (coords[0, 6] - coords[0, 4]),
scala * (coords[1, 6] - coords[1, 4]),
color='red', angles='xy', scale_units='xy', scale=1, width=0.005)
scala = 1.0 / (np.sqrt((coords[0, 7] - coords[0, 5])**2 +
(coords[1, 7] - coords[1, 5])**2))
ax.quiver(coords[0, 5], coords[1, 5], scala * (coords[0, 7] - coords[0, 5]),
scala * (coords[1, 7] - coords[1, 5]),
color='blue', angles='xy', scale_units='xy', scale=1, width=0.005)
ax.legend()
# Draw the street
grenze = 10
x_street = np.linspace(-grenze, grenze, 500)
y_street = street_lam(x_street, amplitude1, frequenz1)
ax.plot(x_street, y_street, color='black', linestyle='-', linewidth=1)
# Draw the ellipse / street points
ax.scatter([coords_es[0, 0]], [coords_es[1, 0]], color='green', s=50)
ax.scatter([coords_es[0, 1]], [coords_es[1, 1]], color='green', s=50)
ax.scatter([coords_es[0, 2]], [coords_es[1, 2]], color='black', s=30)
ax.scatter([coords_es[0, 3]], [coords_es[1, 3]], color='black', s=30)
# line connecting the points of least distance
ax.plot([coords_es[0, 0], coords_es[0, 2]], [coords_es[1, 0], coords_es[1, 2]],
color='green', linestyle='-', linewidth=0.5)
ax.plot([coords_es[0, 1], coords_es[0, 3]], [coords_es[1, 1], coords_es[1, 3]],
color='green', linestyle='-', linewidth=0.5)
# Draw the normals on the ellipses
scala = 1.0 / (np.sqrt((coords_es[0, 4] - coords_es[0, 0])**2 +
(coords_es[1, 4] - coords_es[1, 0])**2))
ax.quiver(coords_es[0, 0], coords_es[1, 0],
scala * (coords_es[0, 4] - coords_es[0, 0]),
scala * (coords_es[1, 4] - coords_es[1, 0]),
color='red', angles='xy', scale_units='xy', scale=1, width=0.005)
scala = 1.0 / (np.sqrt((coords_es[0, 5] - coords_es[0, 1])**2 +
(coords_es[1, 5] - coords_es[1, 1])**2))
ax.quiver(coords_es[0, 1], coords_es[1, 1],
scala * (coords_es[0, 5] - coords_es[0, 1]),
scala * (coords_es[1, 5] - coords_es[1, 1]),
color='blue', angles='xy', scale_units='xy', scale=1, width=0.005)
scala = 1.0 / (np.sqrt((coords_es[0, 6] - coords_es[0, 2])**2 +
(coords_es[1, 6] - coords_es[1, 2])**2))
ax.quiver(coords_es[0, 2], coords_es[1, 2],
scala * (coords_es[0, 6] - coords_es[0, 2]),
scala * (coords_es[1, 6] - coords_es[1, 2]),
color='black', angles='xy', scale_units='xy', scale=1, width=0.005)
scala = 1.0 / (np.sqrt((coords_es[0, 7] - coords_es[0, 3])**2 +
(coords_es[1, 7] - coords_es[1, 3])**2))
ax.quiver(coords_es[0, 3], coords_es[1, 3],
scala * (coords_es[0, 7] - coords_es[0, 3]),
scala * (coords_es[1, 7] - coords_es[1, 3]),
color='black', angles='xy', scale_units='xy', scale=1, width=0.005)
ax.set_xlim(-grenze, grenze)
ax.set_xlabel('x [m]', fontsize=14)
ax.set_ylabel('y [m]', fontsize=14)
ax.set_title('Ellipses and street with normals at contact points', fontsize=16)
ax.grid(True)
Equations of Motion¶
# Bodies
Izz_e = 1 / 4 * m_e * (a**2 + b**2)
inertia_e0 = me.inertia(A0, 0, 0, Izz_e)
inertia_e1 = me.inertia(A1, 0, 0, Izz_e)
ellipse0 = me.RigidBody('ellipse0', Dmc0, A0, m_e, (inertia_e0, Dmc0))
ellipse1 = me.RigidBody('ellipse1', Dmc1, A1, m_e, (inertia_e1, Dmc1))
observer0 = me.Particle('observer0', Po0, m_o)
observer1 = me.Particle('observer1', Po1, m_o)
bodies = [ellipse0, ellipse1, observer0, observer1]
# Forces
forces = []
# Gravity
forces.append((Dmc0, -m_e * g * N.y))
forces.append((Dmc1, -m_e * g * N.y))
forces.append((Po0, -m_o * g * N.y))
forces.append((Po1, -m_o * g * N.y))
# Ellipse0 on ellipse1 due to spring
forces.append((CPee1, force_ee(angle_ee0, pen_ee)[0] * N.x +
force_ee(angle_ee0, pen_ee)[1] * N.y))
forces.append((CPee0, -force_ee(angle_ee0, pen_ee)[0] * N.x -
force_ee(angle_ee0, pen_ee)[1] * N.y))
# ellipse0 on ellipse1 due to friction
forces.append((CPee1, force_ee_friction(angle_ee0, angle_ee1, pen_ee)[0] *
N.x + force_ee_friction(angle_ee0, angle_ee1, pen_ee)[1] * N.y))
forces.append((CPee0, -force_ee_friction(angle_ee0, angle_ee1, pen_ee)[0] *
N.x - force_ee_friction(angle_ee0, angle_ee1, pen_ee)[1] * N.y))
# Street on Ellipse0
forces.append((CPes0, force_es0(X0, pen_se0)[0] * N.x +
force_es0(X0, pen_se0)[1] * N.y))
# Street on Ellipse1
forces.append((CPes1, force_es1(X1, pen_se1)[0] * N.x +
force_es1(X1, pen_se1)[1] * N.y))
# Ellipse0 on street due to friction
forces.append((CPes0, force_es0_friction(X0, angle_street0, pen_se0)[0] * N.x +
force_es0_friction(X0, angle_street0, pen_se0)[1] * N.y))
# Ellipse1 on street due to friction
forces.append((CPes1, force_es1_friction(X1, angle_street1, pen_se1)[0] * N.x +
force_es1_friction(X1, angle_street1, pen_se1)[1] * N.y))
kd = sm.Matrix([u0 - q0.diff(t), u1 - q1.diff(t),
ux0 - x0.diff(t), ux1 - x1.diff(t),
uy0 - y0.diff(t), uy1 - y1.diff(t)])
q_ind = [q0, q1, x0, x1, y0, y1]
u_ind = [u0, u1, ux0, ux1, uy0, uy1]
kanes = me.KanesMethod(N, q_ind, u_ind, kd_eqs=kd)
fr, frstar = kanes.kanes_equations(bodies, forces)
MM = kanes.mass_matrix_full
forcing = kanes.forcing_full
print(f'MM contains {sm.count_ops(MM)} operations')
print(f'forcing contains {sm.count_ops(forcing):,} operations')
qL = [q0, q1, x0, x1, y0, y1, u0, u1, ux0, ux1, uy0, uy1]
pL = [[m_e, m_o, g, a, b, k_spring, amplitude, frequenz, mu],
[angle_ee0, angle_ee1],
[X0, X1],
[angle_street0, angle_street1],
[pen_ee, pen_se0, pen_se1]
]
MM_lam = sm.lambdify(qL + pL, MM, cse=True)
force_lam = sm.lambdify(qL + pL, forcing, cse=True)
MM contains 112 operations
forcing contains 13,118 operations
Numerical Integration¶
grenze = 10.0
accuracy = 50
# brute force search space for minimum distance between ellipse and street
search_space = list(itt.product(np.linspace(-grenze, grenze, accuracy),
np.linspace(0, 2*np.pi, accuracy)))
# Use the results from the initial conditions above
angle_ee00 = angle_root_0
angle_ee11 = angle_root_1
X01 = ellipse_street_root[0][0]
X11 = ellipse_street_root[1][0]
angle_street00 = ellipse_street_root[0][1]
angle_street11 = ellipse_street_root[1][1]
pen_ee0 = pen_ee_lam(*([angle_ee00, angle_ee11] + y00 + pL_vals))
pen_se00 = pen_es_lam0(*[X01, angle_street00] + y00 + pL_vals)
pen_se11 = pen_es_lam1(*[X11, angle_street11] + y00 + pL_vals)
pL_vals1 = [pL_vals,
[angle_ee00, angle_ee11],
[X01, X11],
[angle_street00, angle_street11],
[pen_ee0, pen_se00, pen_se11]
]
args_list = []
zeit_list = []
@profile
def gradient(t, y, args):
# The distances between the ellipses depend continuously on the positions.
# Therefore we can use the previous solution as a starting point
# for the next minimization, and then use the result for root.
def distance_minimizer(X00, args):
angle0, angle1 = X00
return distance_ee_lam(*([angle0, angle1] + args))
x000 = [args[1][0], args[1][1]]
y123 = list(y)
arguments = y123 + args[0]
loesung = minimize(distance_minimizer, x000, arguments)
args[1][0] = loesung.x[0]
args[1][1] = loesung.x[1]
def equations_ee(X00, args):
angle0, angle1 = X00
return distance_ee_grad_lam(*([angle0, angle1] + args))
x000 = [args[1][0], args[1][1]]
arguments = y123 + args[0]
loesung = root(equations_ee, x000, arguments)
args[1][0] = loesung.x[0]
args[1][1] = loesung.x[1]
# find the angles and positions, where the distance between the ellipses
# and the street is minimal.
# As here the minimum distance does NOT depend continuously on the location
# of the ellipses, we first do a brute force search, then a minimization,
# and finally a root search to find the exact minimum.
for i in range(2):
distance_array = np.array([distance_lam(*([street_point,
angle_street] + y123 +
args[0]))[i]
for street_point, angle_street
in search_space])
min_distance_index = np.argmin(distance_array)
street_point_brute = np.linspace(
-grenze, grenze, accuracy)[min_distance_index // accuracy]
angle_street_brute = np.linspace(
0, 2*np.pi, accuracy)[min_distance_index % accuracy]
args[2][i] = street_point_brute
args[3][i] = angle_street_brute
for i in range(2):
# Search by minimizing the distance function.
def distance_minimizer(X00, args):
street_point, angle_street = X00
return distance_lam(*([street_point, angle_street] + args))[i]
x000 = [args[2][i], args[3][i]]
arguments = y123 + args[0]
loesung = minimize(distance_minimizer, x000, arguments)
args[2][i] = loesung.x[0]
args[3][i] = loesung.x[1]
for i in range(2):
def equations(X00, args):
street_point, angle_street = X00
return distance_grad_lam(*([street_point, angle_street] + args))[i]
x000 = [args[2][i], args[3][i]]
arguments = y123 + args[0]
loesung = root(equations, x000, arguments)
args[2][i], args[3][i] = loesung.x
# Find the penetration depths
args[4][0] = pen_ee_lam(args[1][0], args[1][1], *(y123 + args[0]))
args[4][1] = pen_es_lam0(args[2][0], args[3][0], *(y123 + args[0]))
args[4][2] = pen_es_lam1(args[2][1], args[3][1], *(y123 + args[0]))
args_list.append(deepcopy(args))
zeit_list.append(t)
sol = np.linalg.solve(MM_lam(*y, *args), force_lam(*y, *args))
return np.array(sol).T[0]
interval = 10.0
schritte = int(interval * 650)
times = np.linspace(0., interval, schritte)
t_span = (0., interval)
# If this is not set, the integration will miss the (short) times of contact.
max_step = 0.01
start = time.time()
resultat1 = solve_ivp(gradient, t_span, y00, t_eval=times, args=(pL_vals1,),
max_step=max_step)
resultat = resultat1.y.T
print('Shape of result: ', resultat.shape)
print(resultat1.message)
print('Number of function evaluations:', resultat1.nfev)
if choose_symjit:
msg = ' with symjit'
else:
msg = ' with lambdify'
print(f"It took {time.time() - start:.2f} seconds to solve the equations"
f" {msg}")
profiler.print_stats()
Shape of result: (6500, 12)
The solver successfully reached the end of the integration interval.
Number of function evaluations: 6266
It took 516.51 seconds to solve the equations with symjit
Timer unit: 1e-07 s
Total time: 396.411 s
File: C:\Users\Peter\github_repos\pst-notebooks\gallery\plot_two_ellipses_bouncing.py
Function: gradient at line 1002
Line # Hits Time Per Hit % Time Line Contents
==============================================================
1002 @profile
1003 def gradient(t, y, args):
1004 # The distances between the ellipses depend continuously on the positions.
1005 # Therefore we can use the previous solution as a starting point
1006 # for the next minimization, and then use the result for root.
1007
1008 6266 59133.0 9.4 0.0 def distance_minimizer(X00, args):
1009 angle0, angle1 = X00
1010 return distance_ee_lam(*([angle0, angle1] + args))
1011
1012 6266 49374.0 7.9 0.0 x000 = [args[1][0], args[1][1]]
1013 6266 177263.0 28.3 0.0 y123 = list(y)
1014 6266 45592.0 7.3 0.0 arguments = y123 + args[0]
1015 6266 108352568.0 17292.1 2.7 loesung = minimize(distance_minimizer, x000, arguments)
1016 6266 158451.0 25.3 0.0 args[1][0] = loesung.x[0]
1017 6266 107339.0 17.1 0.0 args[1][1] = loesung.x[1]
1018
1019 6266 37921.0 6.1 0.0 def equations_ee(X00, args):
1020 angle0, angle1 = X00
1021 return distance_ee_grad_lam(*([angle0, angle1] + args))
1022
1023 6266 49355.0 7.9 0.0 x000 = [args[1][0], args[1][1]]
1024 6266 43272.0 6.9 0.0 arguments = y123 + args[0]
1025 6266 12065799.0 1925.6 0.3 loesung = root(equations_ee, x000, arguments)
1026 6266 130600.0 20.8 0.0 args[1][0] = loesung.x[0]
1027 6266 110643.0 17.7 0.0 args[1][1] = loesung.x[1]
1028
1029 # find the angles and positions, where the distance between the ellipses
1030 # and the street is minimal.
1031 # As here the minimum distance does NOT depend continuously on the location
1032 # of the ellipses, we first do a brute force search, then a minimization,
1033 # and finally a root search to find the exact minimum.
1034 18798 124325.0 6.6 0.0 for i in range(2):
1035 156687596 2748054736.0 17.5 69.3 distance_array = np.array([distance_lam(*([street_point,
1036 62660000 207319785.0 3.3 5.2 angle_street] + y123 +
1037 62660000 224219433.0 3.6 5.7 args[0]))[i]
1038 31330000 125274542.0 4.0 3.2 for street_point, angle_street
1039 31355064 115415133.0 3.7 2.9 in search_space])
1040
1041 12532 992183.0 79.2 0.0 min_distance_index = np.argmin(distance_array)
1042 37596 3281005.0 87.3 0.1 street_point_brute = np.linspace(
1043 25064 165713.0 6.6 0.0 -grenze, grenze, accuracy)[min_distance_index // accuracy]
1044 37596 2629991.0 70.0 0.1 angle_street_brute = np.linspace(
1045 25064 174729.0 7.0 0.0 0, 2*np.pi, accuracy)[min_distance_index % accuracy]
1046 12532 82138.0 6.6 0.0 args[2][i] = street_point_brute
1047 12532 60319.0 4.8 0.0 args[3][i] = angle_street_brute
1048
1049 18798 134273.0 7.1 0.0 for i in range(2):
1050 # Search by minimizing the distance function.
1051 12532 107479.0 8.6 0.0 def distance_minimizer(X00, args):
1052 street_point, angle_street = X00
1053 return distance_lam(*([street_point, angle_street] + args))[i]
1054
1055 12532 97215.0 7.8 0.0 x000 = [args[2][i], args[3][i]]
1056 12532 87734.0 7.0 0.0 arguments = y123 + args[0]
1057 12532 301124321.0 24028.4 7.6 loesung = minimize(distance_minimizer, x000, arguments)
1058 12532 328278.0 26.2 0.0 args[2][i] = loesung.x[0]
1059 12532 217728.0 17.4 0.0 args[3][i] = loesung.x[1]
1060
1061 18798 125984.0 6.7 0.0 for i in range(2):
1062 12532 81913.0 6.5 0.0 def equations(X00, args):
1063 street_point, angle_street = X00
1064 return distance_grad_lam(*([street_point, angle_street] + args))[i]
1065
1066 12532 91060.0 7.3 0.0 x000 = [args[2][i], args[3][i]]
1067 12532 83717.0 6.7 0.0 arguments = y123 + args[0]
1068 12532 74934241.0 5979.4 1.9 loesung = root(equations, x000, arguments)
1069 12532 325074.0 25.9 0.0 args[2][i], args[3][i] = loesung.x
1070
1071 # Find the penetration depths
1072 6266 4336526.0 692.1 0.1 args[4][0] = pen_ee_lam(args[1][0], args[1][1], *(y123 + args[0]))
1073 6266 3449932.0 550.6 0.1 args[4][1] = pen_es_lam0(args[2][0], args[3][0], *(y123 + args[0]))
1074 6266 3228177.0 515.2 0.1 args[4][2] = pen_es_lam1(args[2][1], args[3][1], *(y123 + args[0]))
1075
1076 6266 9956523.0 1589.0 0.3 args_list.append(deepcopy(args))
1077 6266 46804.0 7.5 0.0 zeit_list.append(t)
1078
1079 6266 16038617.0 2559.6 0.4 sol = np.linalg.solve(MM_lam(*y, *args), force_lam(*y, *args))
1080 6266 136493.0 21.8 0.0 return np.array(sol).T[0]
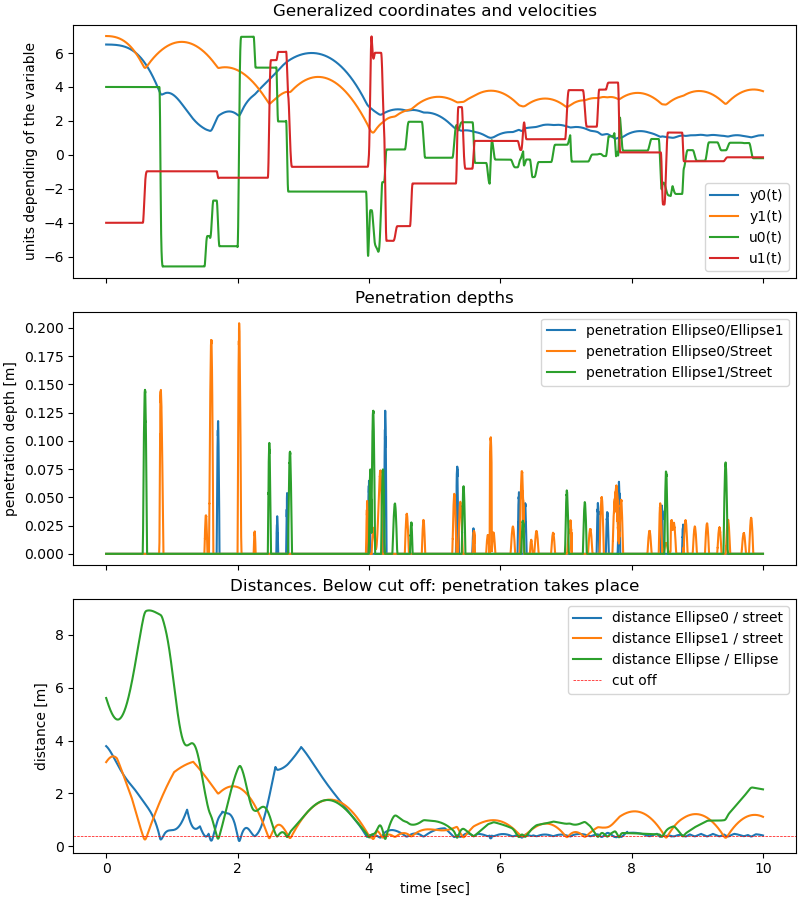
Plot some results
names = [str(i) for i in qL]
fig, ax = plt.subplots(3, 1, figsize=(8, 9), layout='constrained', sharex=True)
for i in (4, 5, 6, 7):
ax[0].plot(times, resultat[:, i], label=names[i])
ax[0].set_ylabel('units depending of the variable')
ax[0].set_title('Generalized coordinates and velocities')
_ = ax[0].legend()
args_1 = [args_list[i][4] for i in range(len(args_list))]
ax[1].plot(zeit_list, [args_1[i][0] for i in range(len(args_1))],
label='penetration Ellipse0/Ellipse1')
ax[1].plot(zeit_list, [args_1[i][1] for i in range(len(args_1))],
label='penetration Ellipse0/Street')
ax[1].plot(zeit_list, [args_1[i][2] for i in range(len(args_1))],
label='penetration Ellipse1/Street')
ax[-1].set_xlabel('time [sec]')
ax[1].set_ylabel('penetration depth [m]')
ax[1].set_title('Penetration depths')
_ = ax[1].legend()
# Find the locations in args_list to match the points returned in resultat.
B = np.array(zeit_list)
A = np.array(resultat1.t)
# Sort B and keep original indices
B_sorted_idx = np.argsort(B)
B_sorted = B[B_sorted_idx]
# Step 2: binary search for closest
pos = np.searchsorted(B_sorted, A)
# Step 3: check neighbors (pos and pos-1) to find which is closer
pos_clipped = np.clip(pos, 1, len(B_sorted)-1)
left = B_sorted[pos_clipped - 1]
right = B_sorted[pos_clipped]
closest_idx_sorted = np.where(
np.abs(A - left) <= np.abs(A - right),
pos_clipped - 1,
pos_clipped
)
# Step 4: convert sorted indices back to original indices of B
closest_idx = B_sorted_idx[closest_idx_sorted]
args_adapted = [args_list[i] for i in closest_idx]
# Plot the distances between the ellipses and the street
# and between the ellipses.
abstand_es_list = []
abstand_ee_list = []
for i in range(len(args_adapted)):
y00 = list(resultat[i])
pL_vals = args_adapted[i][0]
for j in range(2):
angles = (args_adapted[i][2][j], args_adapted[i][3][j])
abstand_es_list.append([dist_se0_lam, dist_se1_lam][j](
*(list(angles) + y00 + pL_vals)))
angles = (args_adapted[i][1][0], args_adapted[i][1][1])
abstand_ee_list.append(dist_ee_lam(*(list(angles) + y00 + pL_vals)))
abstand_es_np = np.array(abstand_es_list).reshape((len(resultat1.t), 2))
ax[2].plot(resultat1.t, abstand_es_np[:, 0],
label='distance Ellipse0 / street')
ax[2].plot(resultat1.t, abstand_es_np[:, 1],
label='distance Ellipse1 / street')
ax[2].plot(resultat1.t, abstand_ee_list, label='distance Ellipse / Ellipse')
ax[2].axhline(cut_off, color='red', linestyle='--', label='cut off',
lw=0.5)
ax[2].set_ylabel('distance [m]')
ax[2].set_title('Distances. Below cut off: penetration takes place')
_ = ax[2].legend()
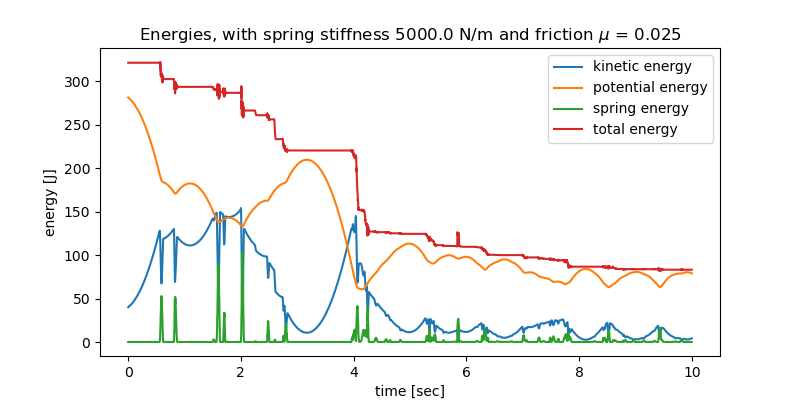
Energy. If mu > 0, it should drop.
kin_energy = sum([koerper.kinetic_energy(N) for koerper in bodies])
pot_energie1 = sum([m_e*g*me.dot(koerper.pos_from(O), N.y)
for koerper in (Dmc0, Dmc1)])
pot_energie2 = sum([m_o*g*me.dot(koerper.pos_from(O), N.y)
for koerper in (Po0, Po1)])
pot_energie = pot_energie1 + pot_energie2
spring_energie = 0.5 * k_spring * (pen_ee**2 + pen_se0**2 + pen_se1**2)
kin_lam = sm.lambdify(qL + pL, kin_energy, cse=True)
pot_lam = sm.lambdify(qL + pL, pot_energie, cse=True)
spring_lam = sm.lambdify(qL + pL, spring_energie, cse=True)
kin_np = np.empty(len(resultat1.t))
pot_np = np.empty(len(resultat1.t))
spring_np = np.empty(len(resultat1.t))
total_np = np.empty(len(resultat1.t))
for i in range(len(resultat1.t)):
y00 = list(resultat[i])
pL_vals = args_adapted
kin_np[i] = kin_lam(*(y00 + args_adapted[i]))
pot_np[i] = pot_lam(*(y00 + args_adapted[i]))
spring_np[i] = spring_lam(*(y00 + args_adapted[i]))
total_np[i] = kin_np[i] + pot_np[i] + spring_np[i]
fig, ax = plt.subplots(figsize=(8, 4))
ax.plot(resultat1.t, kin_np, label='kinetic energy')
ax.plot(resultat1.t, pot_np, label='potential energy')
ax.plot(resultat1.t, spring_np, label='spring energy')
ax.plot(resultat1.t, total_np, label='total energy')
ax.set_xlabel('time [sec]')
ax.set_ylabel('energy [J]')
msg = r'$\mu$'
ax.set_title(f'Energies, with spring stiffness {k_spring1} N/m '
f'and friction {msg} = {mu1}')
_ = ax.legend()
Animation¶
Spit up args_adapted into separate lists for each argument, so CubicSpline can be used
ars_0 = []
args_1 = []
args_2 = []
args_3 = []
args_4 = []
t_arr = np.linspace(0.0, interval, schritte)
for entry in args_adapted:
ars_0.append(entry[0])
args_1.append(entry[1])
args_2.append(entry[2])
args_3.append(entry[3])
args_4.append(entry[4])
args_0_sol = CubicSpline(t_arr, ars_0)
args_1_sol = CubicSpline(t_arr, args_1)
args_2_sol = CubicSpline(t_arr, args_2)
args_3_sol = CubicSpline(t_arr, args_3)
args_4_sol = CubicSpline(t_arr, args_4)
fps = 10.0
state_sol = CubicSpline(t_arr, resultat)
coordinates = Dmc0.pos_from(O).to_matrix(N)
for point in (Dmc1, Po0, Po1, CPee0, CPee1, CPes0, CPes1, CPse0, CPse1):
coordinates = coordinates.row_join(point.pos_from(O).to_matrix(N))
alle = (qL + pL)
coords_lam = sm.lambdify(alle, coordinates, cse=True)
fig, ax = plt.subplots(figsize=(7, 7))
xmin = (np.min(np.concatenate((resultat[:, 2], resultat[:, 3]))) -
max(a1, b1) - cut_off)
xmax = (np.max(np.concatenate((resultat[:, 2], resultat[:, 3]))) +
max(a1, b1) + cut_off)
ymax = (np.max(np.concatenate((resultat[:, 4], resultat[:, 5]))) +
max(a1, b1) + cut_off)
ax.set_xlim(xmin, xmax)
ax.set_aspect('equal')
ax.set_xlabel('x', fontsize=15)
ax.set_ylabel('y', fontsize=15)
ax.axhline(0, color='black', lw=0.5)
ax.axvline(0, color='black', lw=0.5)
# Plot the street
# values for the street
x_street = np.linspace(xmin, xmax, 500)
y_street = street_lam(x_street, amplitude1, frequenz1) + cut_off
ax.plot(x_street, y_street, color='black', linestyle='-', linewidth=1)
ymin = np.min(y_street) - 1.0
ax.set_ylim(ymin, ymax)
t = 0.0
coords = coords_lam(*state_sol(t), args_0_sol(t), args_1_sol(t),
args_2_sol(t), args_3_sol(t), args_4_sol(t))
# draw the ellipses, their mass centers, the observers
ellipse0 = Ellipse((coords[0, 0], coords[1, 0]), width=2*a1 + cut_off,
height=2*b1 + cut_off, angle=np.rad2deg(y00[0]),
facecolor='red', edgecolor='black', label=f'ellipse 0',
alpha=0.5)
ax.add_patch(ellipse0)
ellipse1 = Ellipse((coords[0, 1], coords[1, 1]), width=2*a1 + cut_off,
height=2*b1 + cut_off, angle=np.rad2deg(y00[1]),
edgecolor='black', facecolor='blue', alpha=0.5,
label=f'ellipse 1')
ax.add_patch(ellipse1)
# centers of the ellipses
point_Dmc0 = ax.scatter([coords[0, 0]], [coords[1, 0]], color='red',
edgecolors='black', s=20)
point_Dmc1 = ax.scatter([coords[0, 1]], [coords[1, 1]], color='blue',
edgecolors='black', s=20)
# particles on the ellipses
point_Po0 = ax.scatter([coords[0, 2]], [coords[1, 2]], color='yellow', s=30,
edgecolors='black')
point_Po1 = ax.scatter([coords[0, 3]], [coords[1, 3]], color='yellow', s=30,
edgecolors='black')
# Points of closest distance between the ellipses and the street
point_CPee0 = ax.scatter([coords[0, 4]], [coords[1, 4]], color='black', s=30)
point_CPee1 = ax.scatter([coords[0, 5]], [coords[1, 5]], color='black', s=30)
point_CPes0 = ax.scatter([coords[0, 6]], [coords[1, 6]], color='black', s=30)
point_CPes1 = ax.scatter([coords[0, 7]], [coords[1, 7]], color='black', s=30)
point_CPse0 = ax.scatter([coords[0, 8]], [coords[1, 8]], color='black', s=30)
point_CPse1 = ax.scatter([coords[0, 9]], [coords[1, 9]], color='black', s=30)
line_ee, = ax.plot([coords[0, 4], coords[0, 5]], [coords[1, 4], coords[1, 5]],
color='green', linestyle='-', linewidth=0.5)
line_e0s, = ax.plot(
[coords[0, 6], coords[0, 8]], [coords[1, 6], coords[1, 8]], color='red',
linestyle='-', linewidth=0.5)
line_e1s, = ax.plot(
[coords[0, 7], coords[0, 9]], [coords[1, 7], coords[1, 9]], color='blue',
linestyle='-', linewidth=0.5)
# Function to update the plot for each animation frame
def update(t):
message = (f'Running time {t:.2f} sec \n The yellow dots are observers. \n'
f'The lines indicate the minimal distances.')
ax.set_title(message, fontsize=12)
coords = coords_lam(*state_sol(t), args_0_sol(t), args_1_sol(t),
args_2_sol(t), args_3_sol(t), args_4_sol(t))
point_Dmc0.set_offsets([coords[0, 0], coords[1, 0]])
point_Dmc1.set_offsets([coords[0, 1], coords[1, 1]])
point_Po0.set_offsets([coords[0, 2], coords[1, 2]])
point_Po1.set_offsets([coords[0, 3], coords[1, 3]])
point_CPee0.set_offsets([coords[0, 4], coords[1, 4]])
point_CPee1.set_offsets([coords[0, 5], coords[1, 5]])
point_CPes0.set_offsets([coords[0, 6], coords[1, 6]])
point_CPes1.set_offsets([coords[0, 7], coords[1, 7]])
point_CPse0.set_offsets([coords[0, 8], coords[1, 8]])
point_CPse1.set_offsets([coords[0, 9], coords[1, 9]])
ellipse0.set_center((coords[0, 0], coords[1, 0]))
ellipse0.angle = np.rad2deg(state_sol(t)[0])
ellipse1.set_center((coords[0, 1], coords[1, 1]))
ellipse1.angle = np.rad2deg(state_sol(t)[1])
line_ee.set_data(
[coords[0, 4], coords[0, 5]], [coords[1, 4], coords[1, 5]])
line_e0s.set_data(
[coords[0, 6], coords[0, 8]], [coords[1, 6], coords[1, 8]])
line_e1s.set_data(
[coords[0, 7], coords[0, 9]], [coords[1, 7], coords[1, 9]])
# Create the animation
animation = FuncAnimation(
fig, update, frames=np.arange(0.0, interval, 1 / fps),
interval=1000 / fps, blit=False)
plt.show()
Total running time of the script: (9 minutes 18.352 seconds)