Note
Go to the end to download the full example code.
Heat Diffusion Process with Inequality (betts_10_57)¶
This is example 10.57 from John T. Betts, Practical Methods for Optimal Control Using Nonlinear Programming, 3rd edition, chapter 10: Test Problems. It deals with the ‘discretization’ of a PDE.
More details may be found in section 6.2 of this book.
Notes¶
The equations of motion consist of N - 1 differential quations and N - 1 algebraic equations. The latter are bound to be non - positive.
As the time appears explicitly in the equations of motion, and currently opty does not support this, a function T(t) is defined and a known trajectory map is provided to opty.
States
\(y_1, .....y_{N-1}\) : state variables
Specifieds
\(u_0, u_{\ pi}\) : control variables
import numpy as np
import sympy as sm
import sympy.physics.mechanics as me
import time
from opty import Problem
from opty.utils import MathJaxRepr
Equations of motion.
t = me.dynamicsymbols._t
T = sm.symbols('T', cls=sm.Function)
N = 20
y = list(me.dynamicsymbols(f'y:{N-1}'))
u0, upi = me.dynamicsymbols('u0 upi')
# Parameters
q1 = 1.e-3
q2 = 1.e-3
a = 0.5
b = 0.2
c = 1.0
delta = sm.pi/N
def g(k, t):
x = k * sm.pi/N
return c * (sm.sin(x) * sm.sin(sm.pi*t/5) - a) - b
eom = sm.Matrix([
-y[0].diff(t) + 1/delta**2 * (y[1] - 2*y[0] + u0),
*[-y[i].diff(t) + 1/delta**2 * (y[i+1] - 2*y[i] + y[i-1])
for i in range(1, N-2)],
-y[N-2].diff(t) + 1/delta**2 * (upi - 2*y[N-2] + y[N-3]),
*[g(k, T(t)) - y[k] for k in range(N-1)],
])
MathJaxRepr(eom)
Set Up and Solve the Optimization Problem¶
t0, tf = 0.0, 5.0
num_nodes = 2001
interval_value = (tf - t0) / (num_nodes - 1)
state_symbols = y
specified_symbols = (u0, upi)
times = np.linspace(t0, tf, num=num_nodes)
Specify the objective function and form the gradient.
def obj(free):
value1 = interval_value * ((delta/2 + q1) *
np.sum(free[N*num_nodes:(N+1)*num_nodes]**2))
value2 = interval_value * ((delta/2 + q2) *
np.sum(free[(N+1)*num_nodes:
(N+2)*num_nodes]**2))
value3 = delta * interval_value * np.sum(free[0:N*num_nodes]**2)
return value1 + value2 + value3
def obj_grad(free):
grad = np.zeros_like(free)
grad[N*num_nodes:(N+1)*num_nodes] = \
(2 * (delta/2 + q1) * interval_value *
free[N*num_nodes:(N+1)*num_nodes])
grad[(N+1)*num_nodes:(N+2)*num_nodes] = \
(2 * (delta/2 + q2) * interval_value *
free[(N+1)*num_nodes:(N+2)*num_nodes])
grad[0:N*num_nodes] = (2 * delta * interval_value * free[0:N*num_nodes])
return grad
Specify the instance constraints
instance_constraints = (
*[y[i].func(t0) for i in range(N-1)],
u0.func(t0),
upi.func(t0),
)
Inequality bounds on the last 19 eoms.
eom_bounds = {k: (-np.inf, 0.0) for k in range(N-1, 2*N-2)}
Create the optimization problem.
prob = Problem(
obj,
obj_grad,
eom,
state_symbols,
num_nodes,
interval_value,
instance_constraints=instance_constraints,
known_trajectory_map={T(t): times},
eom_bounds=eom_bounds,
)
Give some rough estimates for the trajectories.
initial_guess = np.zeros(prob.num_free)
Find the optimal solution.
for _ in range(1):
start = time.time()
solution, info = prob.solve(initial_guess)
initial_guess = solution
print(info['status_msg'])
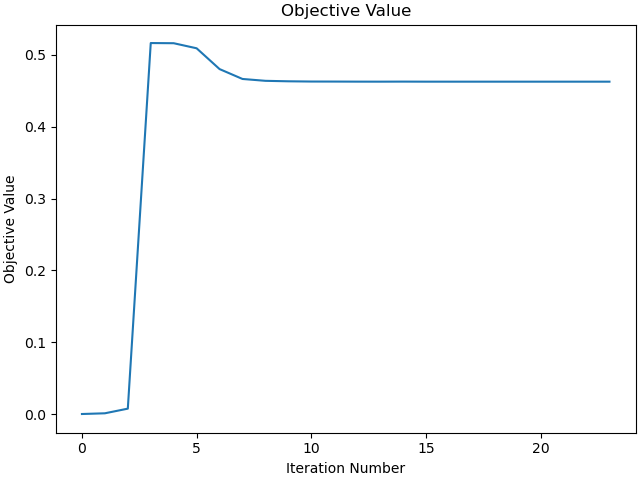
Jstar = 0.468159793
print(f"Objective value achieved: {info['obj_val']:.4f}, as per the book "
f"it is {Jstar:.4f}, so the error is: "
f"{(info['obj_val'] - Jstar) / (Jstar)*100:.3f} % ")
print(f'Time taken for the simulation: {time.time() - start:.2f} s')
b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Objective value achieved: 0.4627, as per the book it is 0.4682, so the error is: -1.163 %
Time taken for the simulation: 143.32 s
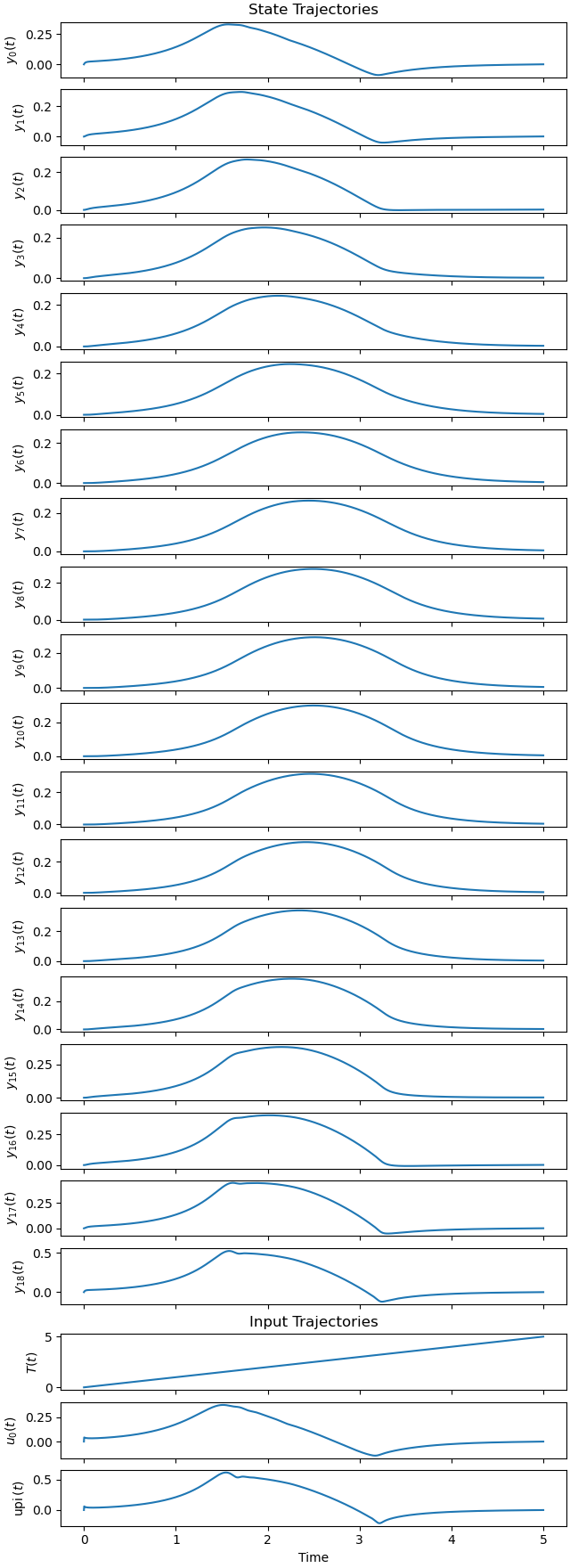
Plot the optimal state and input trajectories.
_ = prob.plot_trajectories(solution)
Plot the constraint violations.
_ = prob.plot_constraint_violations(solution, subplots=True, show_bounds=True)

Plot the objective function.
_ = prob.plot_objective_value()
Total running time of the script: (2 minutes 34.939 seconds)