Note
Go to the end to download the full example code.
Heat Equation (betts_10_58)¶
This is example 10.58 from John T. Betts, Practical Methods for Optimal Control Using Nonlinear Programming, 3rd edition, chapter 10: Test Problems. It deals with the ‘discretization’ of a PDE.
Note:¶
While it converges rapidly to a solution, the objective value achieved is substantially different from that reported in the book.
States
\(y_0, .....y_9, w\) : state variables
Specifieds
\(v, q_{00}, q_{11}\) : control variables
import numpy as np
import sympy as sm
import sympy.physics.mechanics as me
from opty.direct_collocation import Problem
Equations of Motion.¶
t = me.dynamicsymbols._t
q = list(me.dynamicsymbols(f'q:{10}'))
uq = [q[i].diff(t) for i in range(10)]
w = me.dynamicsymbols('w')
v, q00, q11 = me.dynamicsymbols('v q00 q11')
Parameters fom the example.
qa = 0.2
gamma = 0.04
h = 10.0
delta = 1.0 / 9.0
Equations of motion as per the book.
eom = sm.Matrix([
-uq[0] + 1/delta**2 * (q[1] - 2*q[0] + q00),
*[-uq[i] + 1/delta**2 * (q[i+1] - 2*q[i] + q[i-1]) for i in range(1, 9)],
-uq[-1] + 1/delta**2 * (q11 - 2*q[-1] + q[-2]),
-w.diff(t) + 1/gamma * (v - w),
h*(q[0] - w) - 1/(2*delta)*(q[1] - q00),
1/(2*delta)*(q11 - q[-2]),
])
Optimization¶
t0, tf = 0.0, 0.2
num_nodes = 501
interval_value = (tf - t0) / (num_nodes - 1)
state_symbols = q + [w]
def obj(free):
value1 = 1 / (2 * delta) * (qa - free[num_nodes-1])**2
value2 = 1 / (2 * delta) * (qa - free[10 * num_nodes - 1])**2
value3 = 1 / delta * np.sum([(qa - free[(i + 1) * num_nodes - 1])**2
for i in range(1, 9)])
return value1 + value2 + value3
def obj_grad(free):
grad = np.zeros_like(free)
grad[num_nodes - 1] = -1 / delta * (qa - free[num_nodes - 1])
grad[10 * num_nodes - 1] = -1 / delta * (qa - free[10 * num_nodes - 1])
for i in range(1, 9):
grad[(i + 1) * num_nodes - 1] = (-2 / delta *
(qa - free[(i + 1) * num_nodes - 1]))
return grad
# Specify the symbolic instance constraints and the bound, as per the example.
instance_constraints = (
*[q[i].func(t0) - 0 for i in range(10)],
w.func(t0) - 0,
)
bounds = {v: (0.0, 1.0)}
Create the optimization problem.
prob = Problem(
obj,
obj_grad,
eom,
state_symbols,
num_nodes,
interval_value,
instance_constraints=instance_constraints,
bounds=bounds,
time_symbol=t,
)
Give some rough estimates for the trajectories.
initial_guess = np.zeros(prob.num_free)
Find the optimal solution.
solution, info = prob.solve(initial_guess)
print(info['status_msg'])
print(f"Objective value achieved: {info['obj_val']:.4e}, ",
f"as per the book it is {2.45476113*1.e-3:.4e} \n")
b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Objective value achieved: 1.9996e-01, as per the book it is 2.4548e-03
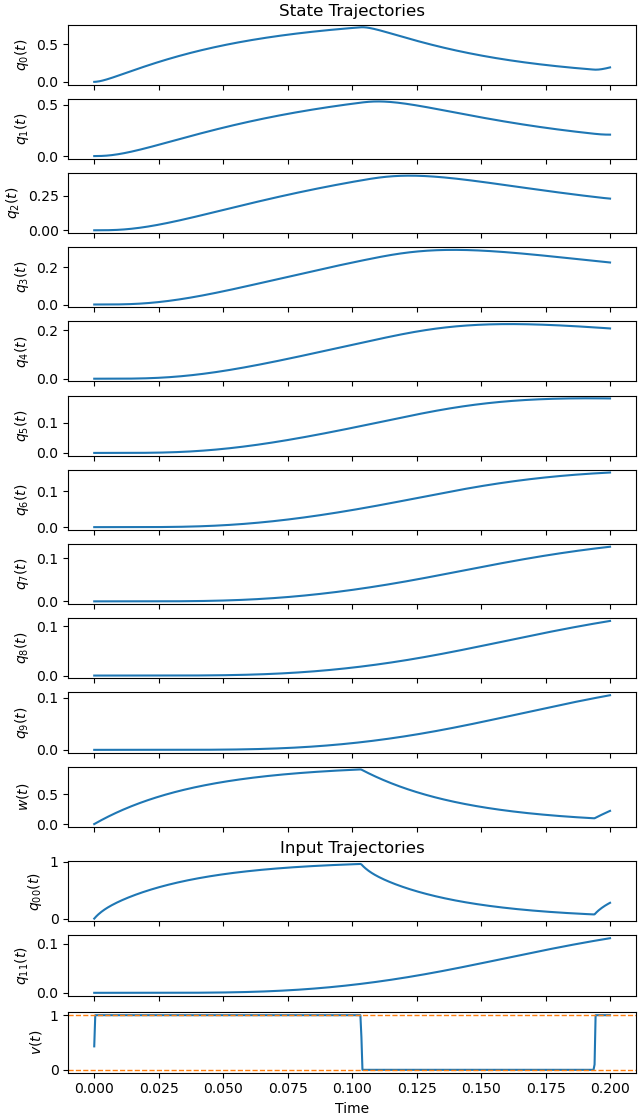
Plot the optimal state and input trajectories.
_ = prob.plot_trajectories(solution, show_bounds=True)
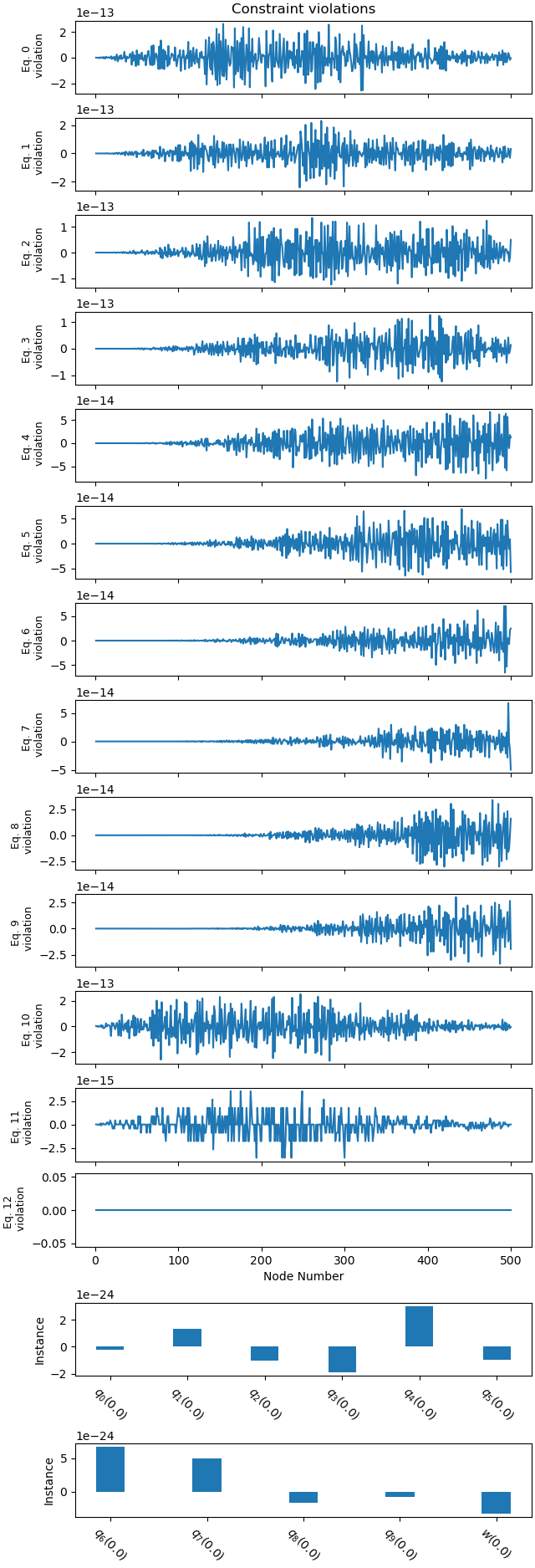
Plot the constraint violations.
_ = prob.plot_constraint_violations(solution, subplots=True)
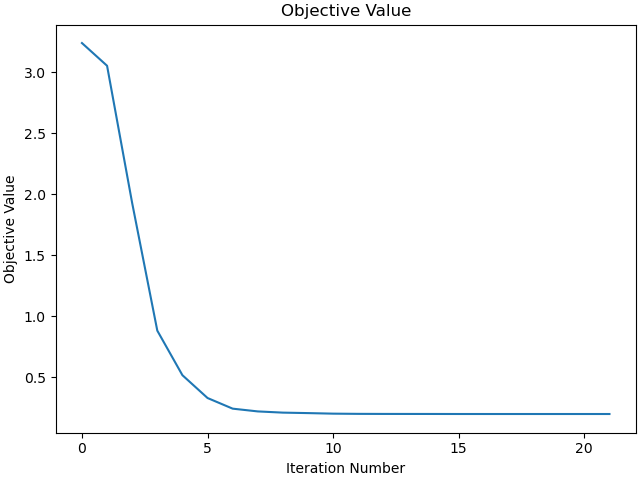
Plot the objective function as a function of optimizer iteration.
_ = prob.plot_objective_value()
Total running time of the script: (0 minutes 10.376 seconds)