Note
Go to the end to download the full example code.
Introduction¶
John T. Bett’s book “Practical Methods for Optimal Control Using Nonlinear
Programming” is considered to be a foundational text in the field of
optimal control using nonlinear programming techniques.
In its section 10 it gives a number of example problems with solutions.
The solutions were calculated by SOS, a Fortran 95 proprietary code
written by Dr. Betts and collaborators, and maintained by ASTOS GmbH.
We solved a number of them using opty.
They may be found at these locations:
location 1: https://opty.readthedocs.io/stable/examples/index.html#beginner
location 2. https://opty.readthedocs.io/stable/examples/index.html#intermediate
location 3: https://pydy.org/pst-notebooks/
Notes:¶
The number of the examples, e.g. 10.58 refers to the numbering in the a.m. book, 3rd edition, 2020
Dr John Betts was always very helpful and answered any questions I had regarding the examples
While most of the examples we tried to solve with
optyconverged easily to a result close to that given in the book, some did not converge
Header row, column 1 (header rows optional) |
Header 2 |
Header 3 |
Header 4 |
body row 1, column 1 |
column 2 |
column 3 |
column 4 |
body row 2 |
Cells may span columns. |
||
body row 3 |
Cells may span rows. |
|
|
body row 4 |
|||
import numpy as np
import sympy as sm
import sympy.physics.mechanics as me
import time
from opty import Problem
from opty.utils import create_objective_function, MathJaxRepr
Equations of motion.
t = me.dynamicsymbols._t
y1, y2, y3, y4, y5, y6, y7, y8, y9, y10 = \
me.dynamicsymbols('y1 y2 y3 y4 y5 y6 y7 y8 y9 y10')
u1, u2, u3, u4 = me.dynamicsymbols('u1 u2 u3 u4')
cx, rx, ux, cz, uz = sm.symbols('cx rx ux cz uz')
uy1 = y1.diff(t)
uy2 = y2.diff(t)
uy3 = y3.diff(t)
uy4 = y4.diff(t)
uy5 = y5.diff(t)
uy6 = y6.diff(t)
uy7 = y7.diff(t)
uy8 = y8.diff(t)
uy9 = y9.diff(t)
uy10 = y10.diff(t)
E = sm.exp(-((y1 - cx)/rx)**2)
Rx = -ux*E*(y1-cx)*((y3 - cz)/cz)**2
Rz = -uz*E*((y3-cz)/cz)**2
eom = sm.Matrix([
-uy1 + y7*sm.cos(y6)*sm.cos(y5) + Rx,
-uy2 + y7*sm.sin(y6)*sm.cos(y5),
-uy3 - y7*sm.sin(y5) + Rz,
-uy4 + y8 + y9*sm.sin(y4)*sm.tan(y5) + y10*sm.cos(y4)*sm.tan(y5),
-uy5 + y9*sm.cos(y4) - y10*sm.sin(y4),
-uy6 + y9*sm.sin(y4)/sm.cos(y5) + y10*sm.cos(y4)/sm.cos(y5),
-uy7 + u1,
-uy8 + u2,
-uy9 + u3,
-uy10 + u4,
])
MathJaxRepr(eom)
Set Up the Optimization Problem and Solve it¶
t0, tf = 0.0, 1.0
num_nodes = 51
interval_value = (tf - t0)/(num_nodes - 1)
state_symbols = (y1, y2, y3, y4, y5, y6, y7, y8, y9, y10)
specified_symbols = (u1, u2, u3, u4)
Specify the objective function and form the gradient.
obj_func = sm.Integral(u1**2 + u2**2 + u3**2 + u4**2, t)
obj, obj_grad = create_objective_function(
obj_func,
state_symbols,
specified_symbols,
tuple(),
num_nodes,
node_time_interval=interval_value,
)
Specify the symbolic instance constraints, the bounds and the known parameter values.
instance_constraints = (
y1.func(t0),
y2.func(t0),
y3.func(t0) - 0.2,
y4.func(t0) - np.pi/2,
y5.func(t0) - 0.1,
y6.func(t0) + np.pi/4,
y7.func(t0) - 1.0,
y8.func(t0),
y9.func(t0) - 0.5,
y10.func(t0) - 0.1,
y1.func(tf) - 1.0,
y2.func(tf) - 0.5,
y3.func(tf),
y4.func(tf) - np.pi/2,
y5.func(tf),
y6.func(tf),
y7.func(tf),
y8.func(tf),
y9.func(tf),
y10.func(tf),
)
bounds = {
u1: (-15.0, 15.1),
u2: (-15.0, 15.0),
u3: (-15.0, 15.0),
u4: (-15.0, 15.0),
y4: (np.pi/2 - 0.02, np.pi/2 + 0.02),
}
par_map = {
cx: 0.5,
rx: 0.1,
ux: 2.0,
cz: 0.1,
uz: 0.1,
}
Create the Problem instance.
prob = Problem(
obj,
obj_grad,
eom,
state_symbols,
num_nodes,
interval_value,
instance_constraints=instance_constraints,
known_parameter_map=par_map,
bounds=bounds,
time_symbol=t
)
Give some rough estimates for the trajectories.
initial_guess = np.zeros(prob.num_free)
Find the optimal solution.
start = time.time()
solution, info = prob.solve(initial_guess)
end = time.time()
print(info['status_msg'])
Jstar = 236.527851
print(f"Objective value achieved: {info['obj_val']:.4f}, as per the book " +
f"it is {Jstar:.4f}, so the error is: "
f"{(info['obj_val'] - Jstar)/Jstar*100:.3f} % ")
print(f"Time taken to solve the optimization problem : {end - start:.2f} s")
b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Objective value achieved: 236.7522, as per the book it is 236.5279, so the error is: 0.095 %
Time taken to solve the optimization problem : 3.05 s
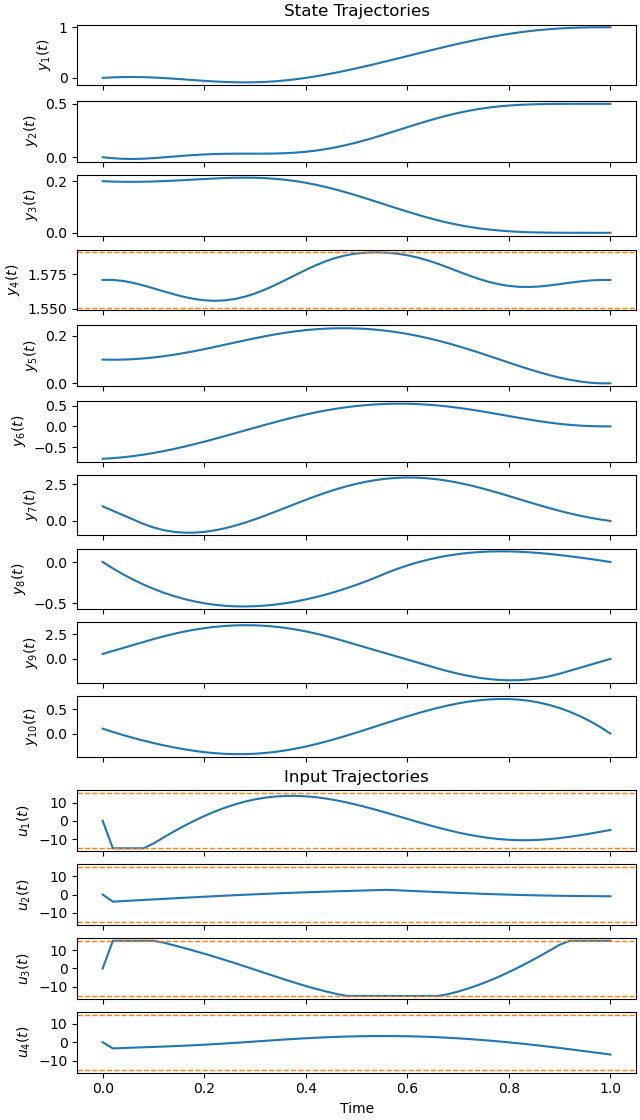
Plot the optimal state and input trajectories.
_ = prob.plot_trajectories(solution, show_bounds=True)
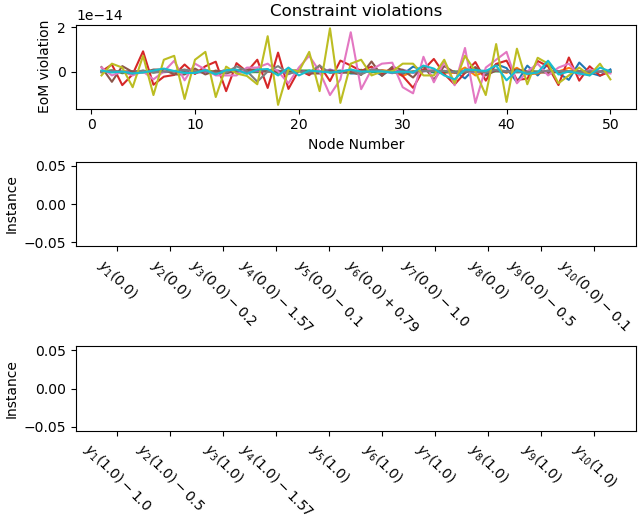
Plot the constraint violations.
_ = prob.plot_constraint_violations(solution)
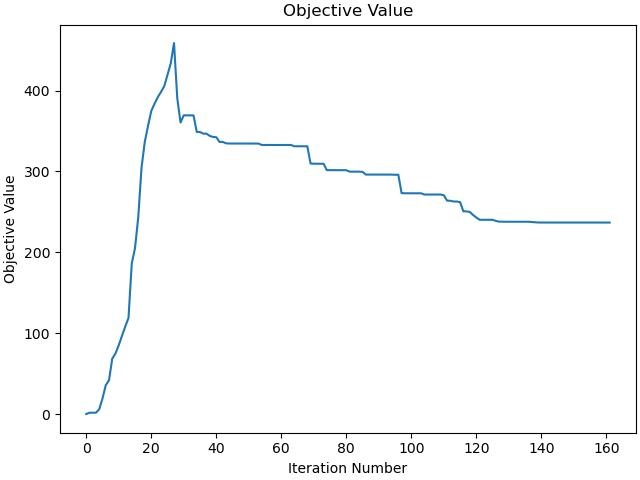
Plot the objective function as a function of optimizer iteration.
_ = prob.plot_objective_value()
Total running time of the script: (0 minutes 16.309 seconds)